Дистанционный информационно-справочно-обучающий (ИСО) программный комплекс для научных исследований и образовательной деятельности
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Введение ……………………………………………………………..………………… |
3 |
||
|
1. |
СТРУКТУРА ДИСТАНЦИОННОГО ИСО-КОМПЛЕКСА
ДЛЯ НАУЧНЫХ ИССЛЕДОВАНИЙ ……………………………………………………………….. |
4 |
|
|
|
1.1. |
Справочник механизмов по И.И.
Артоболевскому ……………………..
|
4 |
|
|
1.2. |
Справочник конструктора-машиностроителя
…………………………... |
14 |
|
|
1.3. |
Учебно-методический
комплекс по теоретической механике …………. |
14 |
|
|
1.4. |
Электронный курс «Техническая механика» …………………………… |
19 |
|
|
1.5. |
Электронный курс «Теория механизмов и машин» ……………………. |
20 |
|
2. |
СХЕМА РАБОТЫ С ДИСТАНЦИОННЫМ ИСО-КОМПЛЕКСОМ ДЛЯ НАУЧНЫХ
ИССЛЕДОВАНИЙ И ОБРАЗОВАТЕЛЬНОЙ ДЕЯТЕЛЬНОСТИ
…………………………………… |
21 |
|
|
|
2.1. |
Навигация
в дистанционной версии ……………………………………... |
21 |
|
|
2.2. |
Навигация
в локальной версии …………………………………………... |
23 |
|
Заключение
……………………………………………………..……………………… |
32 |
||
|
Литература
………………………………………………………….…………………. |
32 |
||
ВВЕДЕНИЕ
В рамках работы по гранту РФФИ 06-07-89195
разработана структура информационно-справочно-обучающей (ИСО) системы в ведущих
предметных областях, таких, как техническая и теоретическая механика, теория
механизмов и машин. На базе единого подхода обеспечена реализация дистанционных
ИСО-сред для исследователей и инженеров, работающих в этих областях,
преподавателей, ими же могут пользоваться студенты, изучающие перечисленные
предметы. ИСО-среда включает справочные средства по теории, методам и примерам
решения научных и технических проблем, фактические справочные данные, средства
моделирования, а также (опциональные) средства контроля и самоконтроля освоения
материала. По сравнению с классическими справочниками справочный материал
расширен теоретико-механическими моделями.
Проведены работы по
использованию в создаваемой ИСО-среде системы инженерного и механического
моделирования на основе программного пакета "Универсальный механизм"
(разработка Брянского ГТУ), проведен анализ связи с пакетом MATLAB-Simulink, а
также с системами инженерного моделирования, комплексами моделирования в
технологии систем многих тел (на примере САПР SolidWorks, Dynamic Designer
Motion, «Компас»). Выполнено моделирование нескольких мехатронных систем
(модель колеса, колесно-шагающий робот).
В качестве базы для системы на этапах
разработки и сопровождения используется система ГЕКАДЕМ (Иркутский
государственный университет, БИБММ) [3], положительный опыт работы с которой
имеется. Создаваемые программные средства поддерживают работу с гипертекстовыми
и гипермедиа-документами, расположенными на компьютерах в Москве (ИПМ, МГУ) и
Астрахани (АГТУ), поддержку моделирования, компьютерной анимации и работы с
мультимедийными данными.
1. СТРУКТУРА ДИСТАНЦИОННОГО
ИСО-КОМПЛЕКСА
ДЛЯ НАУЧНЫХ ИССЛЕДОВАНИЙ
Общая структура ИСО-комплекса представлена на рис.1.

Рис.
1. Структура ИСО-комплекса.
Остановимся подробнее на рассмотрении каждого структурного элемента
ИСО-комплекса.
1.1.
Справочник механизмов по И.И. Артоболевскому
Одной из центральных частей
справочных подсистем являются расширенные справочники по механизмам, по их
теории и конструкции. Использованы известные методики, восходящие к [5,6],
новые примеры могут быть почерпнуты из современных публикаций, аналогичных [7].
Рассмотрим
некоторые примеры следуя [5], иллюстрирующие построение расширенного
кинематическими моделями справочника механизмов (на примере рычажных
механизмов).
Пример 1. Механизмы поршневых машин. Кривошипно-ползунный
аксиальный механизм двигателя.
а)
Схема и принцип действия механизма:
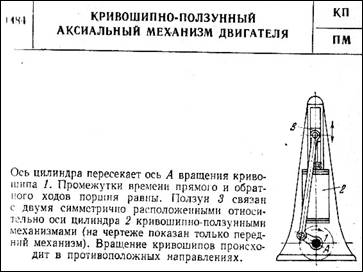
Рис. 2. Пример
исходных справочных данных.
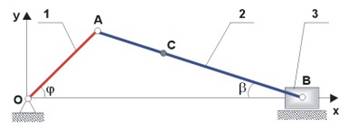
б)
Кинематическая схема:
|
Рис. 3.
Кинематическая схема. |
Звено ОА
- кривошип - совершает вращательное движение. Звено АВ
– шатун - движется плоскопараллельно. Звено
В
– ползун – движется возвратно-поступательно вдоль горизонтальной
направляющей. |
в) Расчет кинематических параметров:
Расчет с
использованием материала темы «Кинематика точки». За основу возьмем
расчетную схему, представленную на рис. 4.
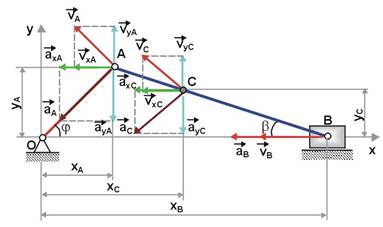
Рис. 4. Расчетная схема.
Уравнения движения точек в
координатной форме:
|
|
|
где  - угол поворота
кривошипа ОА, рад;
- угол поворота
кривошипа ОА, рад;
![]() - угловая скорость
вращения кривошипа ОА, рад/сек;
- угловая скорость
вращения кривошипа ОА, рад/сек;
![]() - угол наклона шатуна АВ к горизонту, рад.
- угол наклона шатуна АВ к горизонту, рад.
Точка
С – центр масс шатуна АВ; АС=0,3l; СВ 0,7l.
Модули полных скоростей точек А, В,
С определятся по
формулам:
|
|
где ![]() ,
, ![]() - проекции полной
скорости точки А на координатные оси х,
у, м/сек;
- проекции полной
скорости точки А на координатные оси х,
у, м/сек;
 , vyB = 0 - проекции
полной скорости точки В на
координатные оси х, у, м/сек;
, vyB = 0 - проекции
полной скорости точки В на
координатные оси х, у, м/сек;
 ,
, ![]() - проекции полной
скорости точки С на координатные оси х, у,
м/сек.
- проекции полной
скорости точки С на координатные оси х, у,
м/сек.
Модуль полных ускорений точек А, В, С можно найти по формулам:
|
|
где ![]() ,
, ![]() - проекции полного
ускорения точки
А на
координатные оси х, у, м/сек2;
- проекции полного
ускорения точки
А на
координатные оси х, у, м/сек2;
 проекции полного ускорения точки В на координатные оси х, у,
м/сек2;
проекции полного ускорения точки В на координатные оси х, у,
м/сек2;
 -
проекции полного ускорения точки С на
координатные оси х, у, м/сек2.
-
проекции полного ускорения точки С на
координатные оси х, у, м/сек2.
Рис.5. Двумерная анимированная модель механизма.
На основе проведенного
кинематического расчета построена анимированная
модель механизма, иллюстрирующая его движение в течение цикла работы.
Кадры, иллюстрирующие положение механизма в различные моменты времени, показаны
выше на рис.5. Кроме того, созданы анимированные модели механизма, показывающие
изменения векторов линейных скоростей и ускорений базовых точек.
Расчет с использованием материала темы
«Плоское движение твердого тела». Звенья механизма
рассматриваются как абсолютно твердые тела. Скорость точки А направлена перпендикулярно кривошипу ОА в сторону угловой скорости ![]() кривошипа ОА (рис. 6).
кривошипа ОА (рис. 6).
Модуль полной скорости точки А
равен: ![]() . Для нахождения скоростей точек звена АВ построен мгновенный центр скоростей РАВ.
. Для нахождения скоростей точек звена АВ построен мгновенный центр скоростей РАВ.
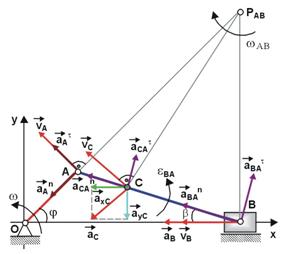
Рис. 6. Расчетная схема
Угловая скорость ![]() вращения звена АВ находится по формуле:
вращения звена АВ находится по формуле:  . Модули скоростей точек В,
С равны:
. Модули скоростей точек В,
С равны: ![]() ,
, ![]() , где
, где ![]() – расстояния от точек В и С
до МЦС звена АВ, м.
– расстояния от точек В и С
до МЦС звена АВ, м.
Полное ускорение точки А можно найти по формуле: ![]() ,
где
,
где ![]() - нормальное ускорение точки А, м/с2 (направлено вдоль
кривошипа ОА от точки А к точке О, модуль равен:
- нормальное ускорение точки А, м/с2 (направлено вдоль
кривошипа ОА от точки А к точке О, модуль равен: ![]() );
); ![]() - касательное ускорение точки А, м/с2 (направлено оно перпендикулярно кривошипу ОА в сторону углового ускорения
- касательное ускорение точки А, м/с2 (направлено оно перпендикулярно кривошипу ОА в сторону углового ускорения ![]() кривошипа ОА, модуль равен:
кривошипа ОА, модуль равен: ![]() , где
, где ![]() , рад/сек2).
, рад/сек2).
Ускорение точки В
определим с использованием теоремы об
ускорениях точек плоской фигуры (в качестве
полюса выбрана точка А):
|
|
где ![]() - полное ускорение точки В, м/с2.
Направлено оно параллельно горизонтальной оси Ох;
- полное ускорение точки В, м/с2.
Направлено оно параллельно горизонтальной оси Ох;
![]() - нормальное ускорение звена АВ при вращении вокруг полюса А, м/сек2. Направлено вдоль
звена АВ от точки В к полюсу А,
модуль равен:
- нормальное ускорение звена АВ при вращении вокруг полюса А, м/сек2. Направлено вдоль
звена АВ от точки В к полюсу А,
модуль равен: ![]() , или с учетом формулы (8):
, или с учетом формулы (8):  ;
;
![]() - касательное ускорение звена АВ при вращении вокруг полюса А, м/сек2. Линия действия
касательного ускорения
- касательное ускорение звена АВ при вращении вокруг полюса А, м/сек2. Линия действия
касательного ускорения ![]() направлена перпендикулярно звену АВ.
направлена перпендикулярно звену АВ.
Неизвестными величинами, подлежащими определению,
являются модули ускорений ![]() .
.
Спроектируем уравнение (12) на координатные
оси.
|
На ось х:
На ось у: |
Решив систему уравнений (13), находим:
|
|
 ,
, или
|
|
|
|
 ,
, .
.Ускорение точки С определим при помощи теоремы об ускорениях точек плоской фигуры: ![]() . В результате получим:
. В результате получим:
|
|
Модуль ускорения точки С
находится по формуле: ![]() .
.
Частный случай
движения кривошипно-шатунного механизма (кривошип ОА
вращается с постоянной угловой скоростью ![]() , и
, и ![]() ).
).
Остановимся более подробно на рассмотрении ускорений
точек.
Полное ускорение точки А можно найти по формуле (11). Если кривошип ОА вращается с постоянной угловой скоростью, получим: ![]() ,
, ![]() .
.
Тогда полное ускорение ![]() точки А
совпадает с нормальным ускорением
точки А
совпадает с нормальным ускорением ![]() ,
модуль полного ускорения
,
модуль полного ускорения ![]() равен:
равен: ![]() . Модули ускорений
. Модули ускорений ![]() ,
,![]() будут равны:
будут равны:
|
|
|
|
 ,
, .
.

г) Дополнительно построена
анимированная модель механизма (рис. 7), которая, помимо движения самого
механизма, показывает, как с течением времени меняется положение мгновенного
центра скоростей звена АВ, а также
иллюстрирует изменения векторов скоростей точек А и В.
|
|
|
|
|
|
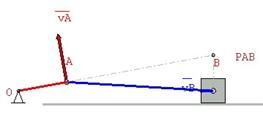
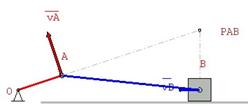
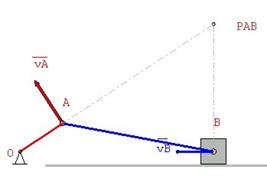
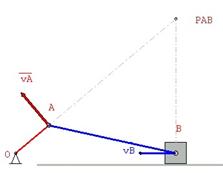
Рис. 7.
Анимированная модель.
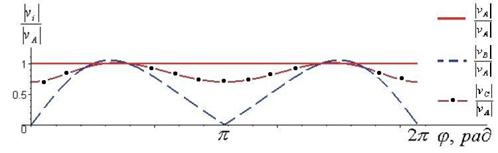
Выводы: В результате проведенных
кинематических расчетов получены формулы для расчета линейных скоростей и
ускорений характерных точек А, В, С.
Для случая, когда ![]() , построены графические зависимости линейных безразмерных
скоростей и ускорений точек А, В, С
от угла поворота кривошипа (см. рис. 8, а, б).
, построены графические зависимости линейных безразмерных
скоростей и ускорений точек А, В, С
от угла поворота кривошипа (см. рис. 8, а, б).
|
|
а)
|
|
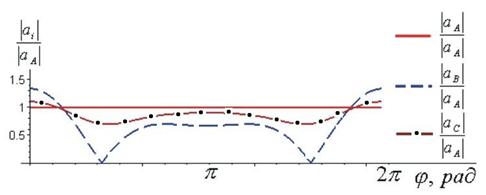
б)
Рис. 8. Скорости и ускорения
механизма.
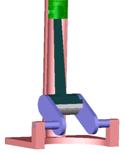
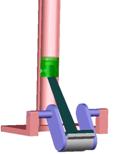
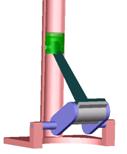
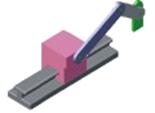
д)
Показаны исполнения кривошипно-ползунного механизма в стержневом виде и в виде
круговых звеньев, соответствующие одной кинематической схеме (рис. 9).
|
|
|
|
|
|
Рис. 9. Кривошипно-ползунный механизм, 3D-модели. |
|||
Пример 2. Кривошипно-шатунный механизм эллипсографа
[5].
а) Схема и принцип действия механизма:
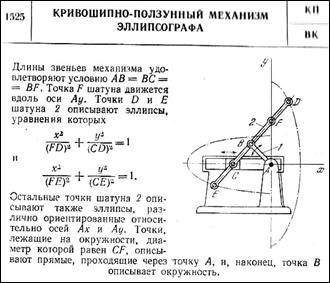
Рис. 10. Механизм эллипсографа по [5].
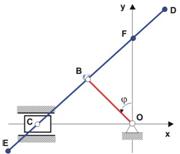
б)
Кинематическая
схема:
|
Рис. 11. Кинематика механизма. |
Механизм
состоит из следующих подвижных звеньев: ОВ
– кривошип, EСD – шатун, С
– ползун. При движении шатуна ED
точки E и D описывают эллипсы,
полуоси которых равны |
в)
Двумерная
анимированная модель:
|
|
|

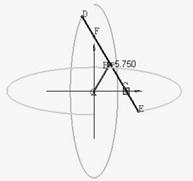
Рис. 12. Анимированная
модель эллипсографа.
г) Расчет кинематических и динамических параметров. Определим
законы движения базовых точек. Воспользуемся координатным способом задания
движения точки. Тогда уравнения движения точки Е можно записать в виде: ![]() , где
, где ![]() - угол поворота
кривошипа ОВ;
- угол поворота
кривошипа ОВ; ![]() - угловая скорость
вращения, тогда
- угловая скорость
вращения, тогда
траектория точки Е – эллипс: ![]() ,
, ![]() .
.
Уравнения движения точки D:
![]() .
.
Траектория точки D – эллипс: ![]() ,
, ![]() .
.
Приведенные примеры показывают схему изложения справочного материала по
механизмам - от схемы конструкции до кинематических характеристик
рассмотренного механизма.
Приведем еще один пример.
Пример 3.
Кривошипно-ползунный механизм эллипсографа [5].
а)
Схема и принцип действия механизма (вторая модель):
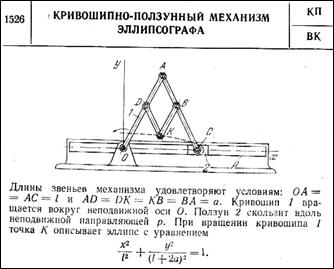
Рис. 13.
Пример кривошипно-ползунного механизма.
б)
Кинематическая схема: Звено ОА – кривошип, АС – шатун, С – ползун, ВК, КD – шатуны.
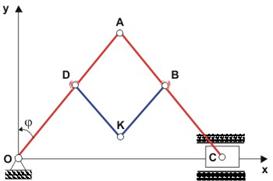
Рис. 14. Кинематическая схема механизма.
в)
Двумерная анимированная модель:
|
|
|
|
АС =
4, ВС = 1 |
АС =
5, ВС = 2 |
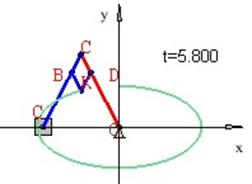
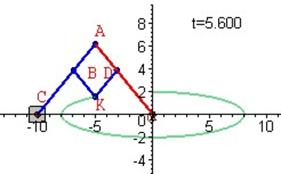
Рис. 15.
Анимированная модель механизма.
г) Расчет кинематических параметров: уравнения движения точки К: ![]() . При движении механизма точка К описывает эллипс:
. При движении механизма точка К описывает эллипс:  , где
, где ![]() - полуоси эллипса.
- полуоси эллипса.
Законы движения базовых
точек механизма в координатной форме запишутся в виде:
для точки С:
![]() ;
;
для точки А:
![]() ;
;
для точки М:
![]() ;
;
для точки D: ![]() ;
;
для точки В:
![]() ;
;
для точки Р:
![]() .
.
1.2.
Справочник конструктора-машиностроителя.
В качестве справочника по современным конструкциям в комплексе
использована книга [6] в электронном формате DJVU.
Имеются разделы: общетехнические
сведения, конструкционные материалы, зарубежные аналоги, подшипники скольжения
и качения, валы и оси, муфты, разъемные соединения, трубопроводы и арматура,
смазочные материалы, редукторы и мотор-редукторы, электродвигатели, и др.
Материал последних издагний справочника отражает требования
нормативно-технической документации, действующей на 1 июня 2006 г.
1.3.
Учебно-методический комплекс по теоретической механике
Учебно-методический
комплекс по теоретической механике, разработанный в
Астраханском государственном техническом университете совместно с Институтом
прикладной математики им. М.В.Келдыша РАН [1-3] включает следующие компоненты.
а)
организационно-информационный блок (календарный план изучения курса; учебный план; рабочие программы; учебные карты;
сборники заданий; методические указания и учебные пособия по теоретической
механике, методические рекомендации по работе с компьютерной обучающей
системой). Кроме того, организационно-информационный блок содержит информацию о
разработчиках курса и преподавателях-тьюторах, сопровождающих курс, а также список обучающихся студентов с
указанием их электронных адресов, объявления
и новости (текущая информация для всех студентов курса).
б) полнообъемный
электронный Интернет-учебник по теоретической механике (свидетельство об
официальной регистрации программы для ЭВМ № 2004612620, Роспатент), выполненный
в форме двух версий: локальной и дистанционной,
программных приложений «Теоретический
материал», «Тесты и задачи», «Практикум». Объем – 400 Мб. Структура
электронного Интернет-учебника по теоретической механике представлена на рис.
16.

Рис.
16. Структура электронного Интернет-учебника по теоретической механике.
Ниже на рис. 17 приведена полная схема
взаимосвязей обучаемого и приложений электронного учебника по теоретической
механике.

Рис.
17. Схема взаимосвязей обучаемого и электронного учебника.
При работе с приложением «Теоретический
материал» обучаемому предлагается изучить теоретический материал (1),
включающий основные определения, теоремы, примеры решения типовых задач. После
изучения каждого раздела обучаемый отвечает на ряд вопросов (самоконтроль) (2).
Вводимые ответы (3) передаются обратно приложению «Теоретический материал»,
которое возвращает обучаемому результат (4).
При обращении к
приложению «Тесты и задачи» обучаемому предлагается набор тестов и задач (5),
после решения которых обучаемый вводит результат решения (6), который
передается приложению «Тесты и задачи». Ответы обучаемого анализируются приложением,
после чего результат (7) сообщается обучаемому.
Взаимодействие
обучаемого с приложением «Практикум» предполагает участие тьютора
(преподавателя) и сводится к шагам: приложение предоставляет обучаемому РГР
(8), выполнив которую, обучаемый передает ее тьютору (9). Правильность
выполнения РГР анализируется тьютором, результат (10) сообщается обучаемому.
Тьютор может обращаться к приложению «Практикум» (14) для уточнения вопросов,
связанных с выполнением РГР обучаемым.
Все три
приложения созданного электронного учебника взаимодействуют между собой (11,
12, 13). Комплекс трех приложений
является электронным учебником,
область его применения - теоретическая
механика для технических ВУЗов. Обе версии (локальная и дистанционная) учебника
созданы в форматах, которые являются стандартами WEB.
Программное приложение
«Теоретический материал». Теоретический материал учебника представлен
разделами: «Кинематика», «Статика», «Динамика точки», «Динамика системы»,
«Аналитическая механика», «Расчет механизмов». Первые пять разделов входят в состав традиционного
курса теоретической механики. В состав учебника включен также раздел «Расчет
механизмов», который является оригинальным авторским учебным пособием, в нем
даны общие понятия механики, описан междисциплинарный подход к расчету
механизмов [2, 3]. Показаны принципы составления кинематических схем по
машиностроительным чертежам. Изложение теоретического материала сопровождается
серией WEB-иллюстраций, в том числе
анимированными 2D, 3D-моделями механических объектов, в частности, механизмов. Разработаны
и применяются анимированные модели механизмов спарника, эллипсографа, синусного
механизма, кулисных механизмов с
качающейся и вращающейся кулисой, планетарных механизмов с внутренним и внешним
зацеплением и многих других. Модели показывают полный цикл движения механизмов,
являются параметрическими и усложняемыми. Приложение «Теоретический материал» содержит в своем
составе «Курс лекций» и «Конспект-справочник». Перечень лекций, соответствующих
основным разделам курса, дан в табл. 1.
Таблица 1
|
№ |
Название
раздела |
Название
лекции |
|
1 |
Кинематика |
Лекция 1. Кинематика точки. |
|
Лекция
2. Кинематика поступательного и вращательного движения твердого тела. |
||
|
Лекция 3. Кинематика плоского движения тела. |
||
|
Лекция
4. Кинематика сложного движения точки. |
||
|
2 |
Статика |
Лекция 5. Основы статики. |
|
Лекция 6. Плоская система сил. |
||
|
Лекция 7. Пространственная система сил. |
||
|
Лекция 8. Равновесие системы тел. |
||
|
Лекция 9. Фермы. |
||
|
Лекция 10. Центр тяжести. |
||
|
Лекция 11. Равновесие твердого тела при наличии трения скольжения. |
||
|
3 |
Динамика
точки |
Лекция 12. Динамика точки (основные понятия). |
|
Лекция 13. Основные теоремы динамики точки. |
||
|
4 |
Динамика
системы |
Лекция 14. Основные теоремы динамики системы. |
|
5 |
Аналитическая
механика |
Лекция 15. Принцип Даламбера. |
|
Лекция 16. Принцип виртуальных перемещений. |
||
|
Лекция 17. Общее уравнение динамики. |
||
|
Лекция 18. Уравнения Лагранжа второго рода. |
||
|
6 |
Расчет
механизмов |
Лекция
19. Комплексный расчет механизмов. |
|
Лекция
20. Комплексный расчет кривошипно-ползунного механизма. |
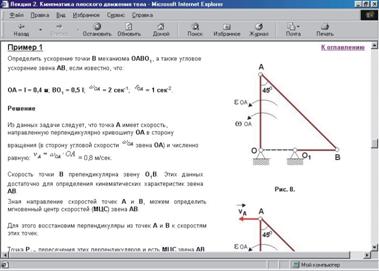
Каждая лекция
содержит оглавление, краткую теорию по изучаемой теме, примеры решения типовых
задач (рис. 18, а, б).
Кроме того,
работать с приложением можно при помощи
гипертекстового «Глоссария» (рис. 18, в).
а)
б)
в)
Рис. 18. Примеры интерфейсов
комплекса.
Теоретический материал
системы обогащен демонстрационными роликами, в том числе моделями ([4]),
статьями, содержащими биографические данные ведущих ученых-механиков.
Программное
приложение «Тесты и задачи». Система тестового контроля знаний по курсу
«Теоретическая механика» в настоящий момент включает около 700 тестовых заданий
типов «да/нет», «выбор одного правильного ответа из списка предложенных», «ввод
собственного ответа» (рис. 19). Включены в состав обучающей системы «хитрые»
задачи механики и задачи на сравнение. Кроме того, создан электронных аналог (в
виде системы контроля знаний) сборника заданий под редакцией Мещерского.
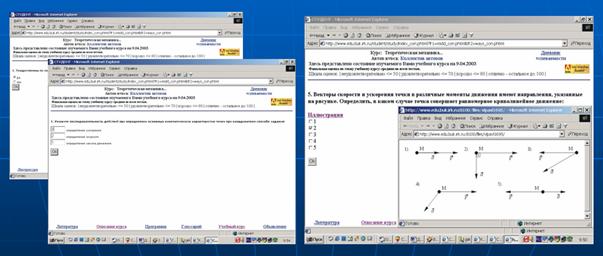
Рис.
19
Разработан банк заданий разных групп сложности, а также заданий, обеспечивающих межтематическое тестирование по основным разделам курса теоретической механики и итоговый контроль знаний студентов, завершивших изучение курса. Это позволит регулярно контролировать и, при необходимости, поддерживать требуемый уровень знаний выпускников.
Программное
приложение «Практикум».
Приложение
«Практикум» предназначено для выполнения на компьютере расчетно-графических
работ по теоретической механике, обработки результатов в наглядной,
преимущественно графической форме, общепринятой в науке и технике.
Структура компьютерной расчетно-графической работы. Каждая РГР приложения
«Практикум» включает:
1)
название и цель работы, описание структуры документа;
2)
краткую теорию по изучаемой теме, основные формулы;
3)
методические указания по выполнению работы;
4)
условие задачи, варианты заданий;
5) примеры решения и результаты;
6) этапы выполнения работы, анализ результатов, выводы (рис. 20).
Каждая из семи РГР
приложения «Практикум» выполнена в табличном процессоре Microsoft Excel в виде отдельного файла, состоящего из нескольких
листов, содержащих текстовый материал, рисунки, формулы, диаграммы, расчеты.

Рис. 20. Интерфейсы
Практикума
1.4.
Электронный курс
«Техническая механика»
В курсе представлены основы
теоретической механики (раздел «Статика»: сила, классификация сил, проекция
силы на ось и на плоскость, момент силы относительно центра и оси,
классификация связей, системы сил, уравнения равновесия различных систем сил,
примеры решения задач определения реакций связей), основы сопротивления
материалов (расчеты на прочность при растяжении-сжатии, кручении, изгибе).
1.5.
Электронный курс
«Теория механизмов и машин»
Содержание: В развитие (расширение)
систем «Теоретическая механика» и «Техническая механика» введен новый
информационно-справочно-обучающий материал по классификации механизмов и машин,
методам расчета оптимальных геометрических параметров механизмов.
Разработанный ранее подход
применен для создания электронного комплекса по курсу «Теория механизмов и
машин», который отличается наличием механизмов, большого числа иллюстраций для
пояснения используемых в курсе графических методов. Анимационные примеры
исполнения механизмов различного назначения и их кинематического исследования,
разработанные в разделе «Расчет механизмов», дают единообразный подход
иллюстрирования принципов работы механизмов для курсов «Теоретическая механика»
и «Теория механизмов и машин».
Курс «Теория
механизмов и машин» структурирован по разделам, объединяющим структурное
исследование, методы синтеза и анализа различных видов механизмов (рычажных,
кулачковых, зубчатых и т.д.). Содержание курса соответствует государственному
стандарту для подготовки бакалавров, магистров, а также специалистов-механиков
по полиграфическим машинам и технологиям. Структура учебника, его содержание и
объем могут быть модифицированы в зависимости от требований государственных
стандартов специальности или направлений.
Предполагается
дополнить курс «Теории механизмов и машин» разделом «Лабораторные работы»,
позволяющий компенсировать отсутствие в большинстве вузов громоздкого и
дорогостоящего лабораторного оборудования.
Разработанные материалы
переданы в Институт дистанционного обучения (ИДО) в АГТУ для дальнейшего
размещения на сервере ИДО АГТУ. Созданный электронный учебник «Теоретическая
механика» внедрен на кафедрах теоретической и прикладной механики Московского
государственного университета печати и Кубанского государственного
технологического университета; используется как средство сопровождения учебного
процесса при традиционной форме обучения, а также в форме самостоятельного и
дистанционного обучения.
При переходе на обучение по
двухуровневой системе (бакалавриат, магистратура) сформированный массив знаний,
осуществленный в единой системе, дополняемый курсами механического цикла по
учебным программам подготовки специалистов, станет электронным ресурсом по
разделу «Механика», пригодным для обучения студентов различных специальностей с
разными количествами часов, отведенных для изучения указанной дисциплины (рис.
21).
ЭЗ – элемент знаний

Рис. 21. Формирование
механических курсов на основе общего массива элементов знаний
При создании ДОС, кроме того, решены вопросы программной реализации,
включающие:
·
выбор форматов с учетом их взаимной
совместимости и возможности передачи по сети Интернет;
·
выбор соответствующих программных
средств и реализацию технологической цепочки разработки ДОС;
·
обеспечение возможности локальной и дистанционной
работы с приложениями;
· обеспечение модификации учебника, в
частности, пополнения новым учебным материалом.
2.
СХЕМА РАБОТЫ С ДИСТАНЦИОННЫМ
ИСО-КОМПЛЕКСОМ ДЛЯ НАУЧНЫХ
ИССЛЕДОВАНИЙ И ОБРАЗОВАТЕЛЬНОЙ ДЕЯТЕЛЬНОСТИ
2.1. Навигация в дистанционной версии
Для того, чтобы начать
работу с обучающими подсистемами комплекса необходимо перейти на сайт www.edu.buk.irk.ru. При этом загружается
стартовая страница системы дифференцированного Интернет-обучения «Гекадем»
[3]. Начальная подсистема - «Студент»
(рис. 22).
Рис. 22. Стартовая страница системы Рис. 23. Окно
идентификации
«Гекадем»
Далее загружается окно
идентификации, в соответствующие поля которого обучаемый вводит присвоенные ему
при регистрации имя и пароль (рис. 23).
Затем обучаемый
выбирает курс, с которым будет работать (в данном примере это курс
«Теоретическая механика»).
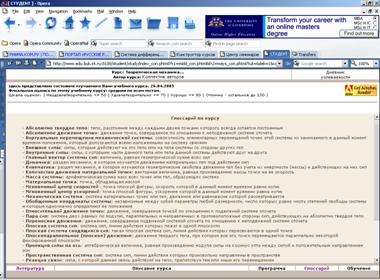
Загружается
трехфреймовая страница (рис. 24), верхний фрейм которой содержит информацию о
названии курса и авторах, левый фрейм представляет собой выполненный в виде
гипертекстовых ссылок список тем, а правый фрейм – это рабочее поле, куда
загружается информация. В нижней части страницы приводятся общие сведения о
курсе: описание курса, программа и используемая при подготовке курса
литература.
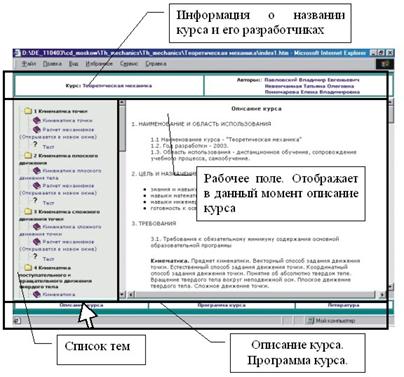
Рис.
24. Начальная трехфреймовая страница курса.
Нажатием на название темы в
списке, расположенном в левом фрейме, можно загрузить в правый фрейм содержимое
данной темы (рис. 25).
Если обучаемый нажмет на
кнопку «Тест», то в рабочее поле загрузится модуль контроля знаний (рис. 26).
Пути
гипертекстовых переходов от стартовой страницы к модулям контроля знаний для каждого
учебного блока показаны на рис. 27.
При работе
модулем контроля знаний загружается окно, содержащее информацию о названии
теста, типах и количестве вопросов, содержащихся в выбранном тесте.
Далее
последовательно осуществляется работа с различными типами вопросов и сообщается
результат тестирования по вопросам разных типов и общий результат прохождения
теста.
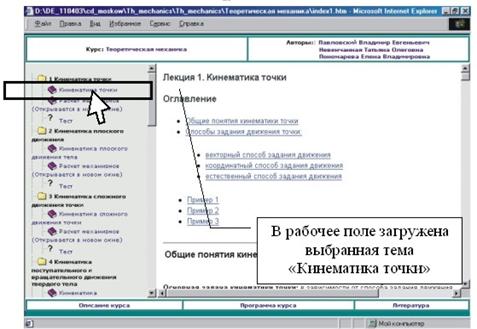
Рис. 25.
Интерфейс справочного модуля.
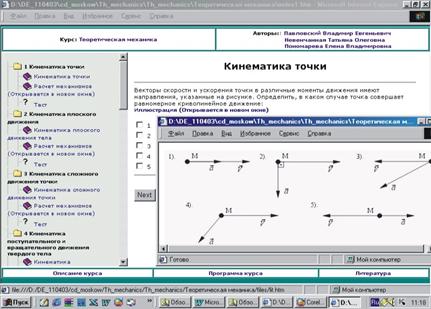
Рис. 26.
Интерфейс модуля контроля знаний.
Рассмотрим далее навигацию в
локальной версии учебника.
2.2. Навигация в локальной версии.
Для того, чтобы начать
работу с локальной версией электронного учебника по теоретической механике,
необходимо из корневого каталога диска загрузить файл index.htm (рис. 28).
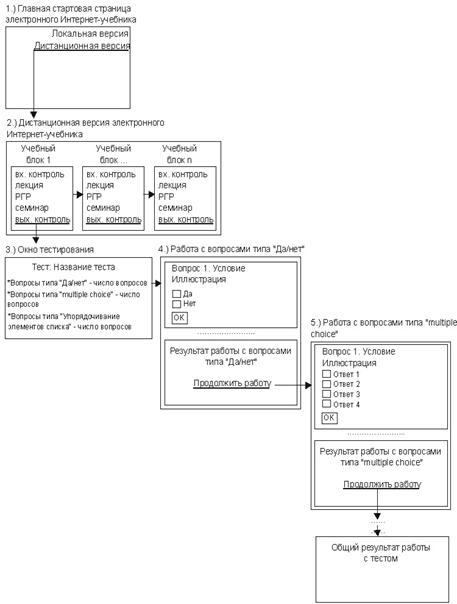
Рис. 27. Гипертекстовые
связи.
Рис. 28. Начальный вызов системы.
В результате откроется окно
стартовой страницы электронного учебника (рис. 29).
Рис.
29. Главная стартовая страница учебника
По ссылке «Локальная версия»
загружается стартовая страница локальной версии (рис. 30).
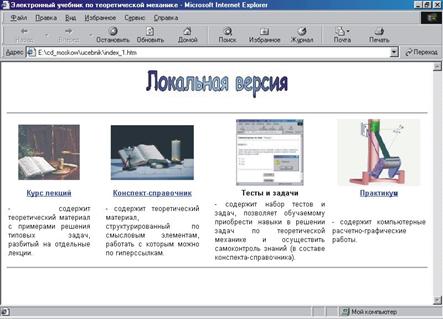
Рис. 30.
Стартовая страница локальной версии
Эта стартовая страница
содержит гипертекстовые ссылки переходов (рис.31) к программным приложениям
«Тесты и задачи», «Практикум» и к реализациям «Курс лекций» и
«Конспект-справочник» приложения «Теоретический материал» локальной версии.
Реализация «Курс лекций». Начало работы с приложением «Теоретический
материал», реализацией «Курс лекций» осуществляется нажатием (выбором) ссылки
«Курс лекций» (рис. 31).
Рис.
31. Выбор и переход к курсу лекций.
В новом окне (рис. 32)
загружается стартовая страница реализации «Курс лекций» приложения
«Теоретический материал» учебника. Данная страница включает содержание лекций,
по которому обучаемый может перейти к любой лекции курса, а также кнопки
перехода «Главная», «Конспект», «Тесты», «Практикум».
Рис. 32. Оглавление курса лекций.
Структура окна каждой лекции
реализации «Курс лекций» однофреймовая (рис. 33). В рамках одной лекции
существует внутренняя навигация, осуществляемая посредством организации
оглавления, выполненного в виде гипертекстовых ссылок. Взаимосвязь между
лекциями осуществляется благодаря кнопкам «Вперед», «Назад» и «Содержание».
Рис. 33. Внутренняя
навигация лекции.
Реализация «Конспект-справочник». Для того, чтобы начать работу с реализацией
«Конспект-справичник» приложения «Теоретический материал», нажимаем ссылку
«Конспект-справочник» (рис. 34).
Рис.
34. Стартовая страница локальной версии
Стартовая
страница реализации «Конспект-справочник» (рис. 35) содержит оглавление
разделов, выполненное в виде гипертекстовых ссылок, а также кнопки перехода
«Главная», «Курс лекций», «Тесты» и «Практикум».
Если выбрать по оглавлению
стартовой страницы один из разделов, в новом окне загрузится трехфреймовая
(трехоконная) страница, представляющая нужный раздел (рис. 36).
Рис. 35. Вызов
конспекта-справочника.
Рис.
36. Трехфреймовая структура раздела.
Фрейм 1 трехфреймовой
страницы (рис. 36) содержит кнопки: «Главная», «Курс лекций», «Тесты» и «Практикум»,
которые осуществляют переходы к главной стартовой странице и приложениям (и
реализации «Курс лекций») локальной версии электронного учебника.
Фрейм 2
представляет собой выполненное в виде списка гипертекстовых ссылок оглавление
того раздела, с которым в настоящий момент работает обучаемый. Нажатие на любой
элемент - гипертекстовую ссылку -
оглавления (фрейма 2) приведет к тому, что во фрейм 3 (рабочее поле)
загрузится теоретический материал, соответствующий выбранному элементу
оглавления во фрейме 2. Кроме того, имеется «внутренняя» связь элементов знаний
каждого из разделов конспекта-справочника, которая осуществляется благодаря
кнопкам «Вперед» и «Назад», расположенным во фрейме 3 (по окончании изучения
теоретического материала элемента).
Общая схема гипертекстовых
переходов к реализациям «Курс лекций» и «Конспект-справочник» показана на рис.
37, а и
рис. 37, б.

а)
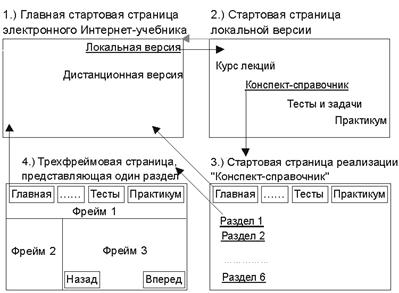
б)
Рис.
37. Гипертекстовые переходы в обучающей ситсеме.
Приложение «Тесты и задачи» в локальной версии учебника
служит для проведения самоконтроля знаний. Для начала работы с тестами
необходимо нажать на кнопку «Самоконтроль» (рис. 38).
Рис. 38.
Интерфейс модуля тестов.
На рисунке показан вид окна модуля
самоконтроля по теме «Фермы» (раздел «Статика»). Модуль самоконтроля содержит
информацию о названии темы самоконтроля, номере текущего вопроса, условии
(текстовая часть, иллюстрация), вариантах ответов. В состав модуля включены
также поля формы, куда обучаемый вводит ответ, и кнопки «Готово», «Помощь».
При работе обучаемого с приложением «Тесты и
задачи» в режиме самоконтроля обеспечивается обратная связь: если обучаемый не
знает, как самостоятельно решить задачу, он может нажать на кнопку «Помощь», в
результате чего появится новое окно, в котором будет показано правильное
решение поставленной задачи и ссылка на раздел (тему раздела), который
необходимо повторить (рис. 39).
При нажатии на ссылку, расположенную после
слова «Повторить», в новом окне загрузится теоретический материал, который
рекомендуется повторить или изучить заново.
Приложение «Практикум». Переход к приложению
«Практикум» в локальной версии осуществляется от главной стартовой страницы
учебника. При этом загружается стартовая страница приложения «Практикум.
Стартовая страница приложения содержит оглавление, по которому обучаемый
переходит к выбранной РГР (рис. 40).
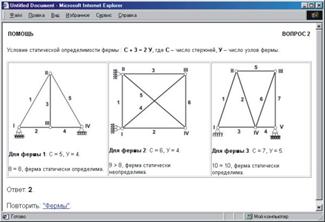
Рис. 39. Пример решения задачи.
Рис. 40. Интерфейс расчетно-графической задачи.
В пределах одной РГР возможны
переходы между отдельными листами при помощи кнопок «Лист 1», «Лист 2» и т.д.
(рис. 41).
Рис. 41. Многолистовое задание.
С любого листа каждой из РГР можно перейти на главную страницу учебника и к любому приложению локальной версии посредством кнопок «Главная», «Курс лекций», «Конспект», «Тесты».
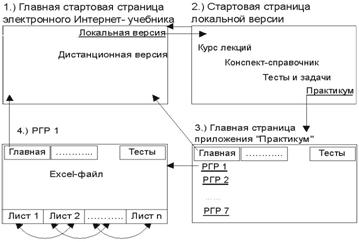
Рис. 42. Схема навигации
ЗАКЛЮЧЕНИЕ
Эксперименты с созданными
обучающими системами проводились в течение 3-х лет в АГТУ. Они показали
эффективность созданных систем, служающих действенным дополнительным
инструментом в учебном процессе. Немаловажным достоинством этих систем явилась
возможность их использования как справочных комплексов.
На основании этого опыта
была создана предлагаемая концепция построения ИСО-комплексов по
"механическим разделам", включившая механику, теорию и практику
механизмов и машин. Для нее подготовлена технология создания различных
компьютерных средств, реализующих предложенную концепцию. Выбраны средства
реализации, форматы моделей и данных, средства навигации. Проведенные
эксперименты и базовые тестовые реализации подтверждают вывод об эффективности
выбранной методики и позволяют рекомендовать предложенную технологию для более
широкого применения как достаточно универсальную технологию построения
ИСО-сред.
ЛИТЕРАТУРА
[1] Павловский В.Е.,
Невенчанная Т.О., Курганская Г.С., Пономарева Е.В. Концепция, структура,
программная реализация электронного Интернет-учебника. Препринт ИПМ им. М.В.
Келдыша РАН, № 39. М., 2003. 28 с..
[2] Невенчанная Т.О.,
Павловский В.Е., Пономарева Е.В. Комплексный расчет механизмов в электронном
учебнике по теоретической механике. Препринт ИПМ им. М.В. Келдыша РАН, №38. М.,
2003. 24 с.
[3] Электронный ресурс ГЕКАДЕМ. www.hecadem.ru.
[4] Матросов А.В. Maple 6.
Решение задач высшей математики и механики. СПб: БХВ–Петербург, 2001. 528 с.
[5] Артоболевский И.И.
Механизмы в современной технике (справочное пособие для инженеров,
конструкторов и изобретателей). т.2. Кулисно-рычажные и кривошипно-ползунные
механизмы. М.: Наука, 1979. 560 с.
[6] В.И. Анурьев. Справочник
конструктора машиностроителя: В 3 т.
т.1-3. - М.: Машиностроение, 2001. - 864с.
[7] Han C., Kim J., Kim J., Park F.C. Kinematic sensitivity analysis of the 3-UPU
parallel mechanism. // Mechanism and
Machine Theory,
Volume 37, Num.8, August 2002 , pp. 787-798.