Аннотация
Работа посвящена моделированию электромагнитного ускорения и торможения
лайнера в устройстве обострения мощности. Рассмотрено двумерное приближение,
соответствующее сечению исходной пространственной области продольной плоскостью.
В модели учтен контакт лайнера с опорами, расположенными в торцевых частях ускорителя.
Использованы условие прилипания лайнера к опоре и условие скольжения лайнера по опоре.
Приведены результаты расчетов. Выполнен сравнительный анализ двух моделей контакта.
Abstract
The work is aimed to the modeling of electromagnetic acceleration and breaking of
liner in device of intensification of power. The 2D approach is discussed,
corresponding to the cross- section of spatial region by the longitudinal plane.
The contact between the liner and the support block situated at the front end of the device is considered.
The adhesion condition and the slip condition are used for the contact simulation.
The calculation results are demonstrated, two contact models are compared.
Содержание
1. Постановка задачи
и физическая модель
2. Математическая
модель
3. Метод численного
решения
4. Физические параметры
5. Результаты расчетов
6. Заключение
Литература
1. Постановка задачи и
физическая модель
Установка «МОЛ» («Магнитное обжатие
лайнеров») предназначена для исследования работы всех ступеней модуля установки
«Байкал» и генерации электрического импульса мегаджоульного уровня. Для
установки «МОЛ» [1,2] разработан макет усилительного каскада мощности
(магнитный компрессор – МК), работа которого основана на сжатии магнитного
потока лайнером, ускоренным электродинамическими силами до скорости 0.8 км/с.
Принцип работы усилителя аналогичен принципу работы взрывомагнитного генератора
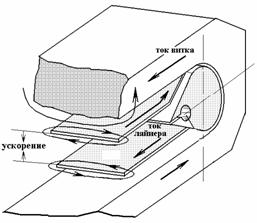
[3], однако разгон лайнера осуществляется электромагнитными силами. Элементы
устройства показаны на рис. 1.1А. На
рис. 1.1Б указано направление протекания токов, направление ускорения и
конфигурация ускоряющего магнитного поля.
|
 А А
|
Б
|
|
Рис. 1.1. Эскиз основных деталей генератора тока и
продольное сечение собранного устройства: А - ускоряемая плоская лента с
натяжным устройством и виток идуктора магнитного поля; Б - поперечное сечение
генератора в собранном виде, указано направление протекания токов,
направление ускорения и конфигурация ускоряющего магнитного поля.
|
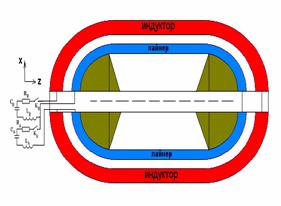
Магнитный компрессор работает
следующим образом (рис. 1.2). В начальный момент времени конденсатор в цепи
индуктора заряжен до некоторого начального напряжения. После замыкания цепи по индуктору (и лайнеру) начинает течь разрядный ток.
Созданное им в канале ускорителя магнитное поле взаимодействует с протекающим
по лайнеру током, ускоряя лайнер в направлении от индуктора. В некоторый момент
времени (возможно, нулевой) замыкается и цепь лайнера. Ток этой цепи протекает по лайнеру и создает внутри полости лайнера
дополнительное магнитное поле. Ускорившись, лайнер сжимает это поле, которое
окончательно выводится из системы в виде
импульса тока в цепи лайнера.
В процессе ускорения лента лайнера
ложится на наклонную поверхность призм (см. рис.1.1.), расположенных в торцевых
частях компрессора. Призмы использованы для ограничения деформации ленты и
предотвращения ее обрыва.
|
А
|
Б
|
|
Рис. 1.2. Характерная
схема сечения плоскостью y = const пространственной области, в которой
решается задача (в рамке) и электротехнические цепи устройства: А – задача
без учета призм; Б – задача с учетом призм
|
Для изучения протекающих явлений
рассмотрим два двумерных приближения. Сечение исходной пространственной области
плоскостью z = const подробно обсуждено в работах [3, 4]. Там построена и проанализирована так называемая
«поперечная» модель, в которой искомые
величины зависят от (x,y,t). В данной работе рассмотрено
сечение исходной пространственной области плоскостью y = const. Соответствующую модель будем называть продольной.
В случае продольной модели
рассмотрено два варианта торцевых (находящихся вблизи границ по z) областей устройства. В первом выбрана область, изображенная на
рис.1.2.А. Полученные результаты изложены
в [5]. В расчетах [5] не учитывался контакт лайнера с
призмой. Во втором варианте рассмотрена
расчетная область рис. 1.2.Б. Для изображения коммутации внешних цепей в центре рисунка расположена искусственная
прямоугольная подобласть.
В продольной модели все величины
зависят только от координат x, z и времени t. Это означает формально бесконечную
протяженность системы в направлении оси y.
Однако в модели учтена и некая
"эффективная" длина системы в y - направлении, в значительной степени
определяющая процесс перекачки энергии
из внешней электрической цепи в кинетическую энергию лайнера.
Индуктор предполагается неподвижным.
Его форма остается неизменной, материал индуктора является проводником. Лайнер
подвижен, его положение подлежит расчету в зависимости от протекающих
процессов. Считаем, что материал лайнера
представляет собой упругое твердое
тело.
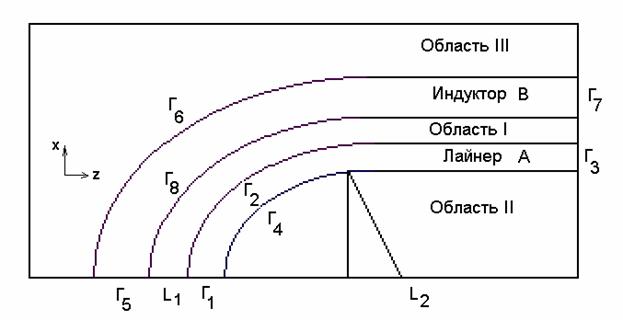
Рис. 1.3. Характерная схема четверти сечения пространственной области плоскостью у = const, в которой решается продольная задача.
Продольное сечение в рассматриваемом
приближении имеет две плоскости симметрии. Поэтому в дальнейшем задача решается
в одной четверти исходной области, которая схематично изображена на рис. 1.3.
Цель данной работы состоит в
математическом моделировании электромагнитного ускорения и торможения лайнера с
учетом контакта с опорой. При этом необходимо
исследовать поведения лайнера для различных параметров задачи и различных моделей контакта.
Работа выполнена при частичной
финансовой поддержке РФФИ (проект № 06 – 01 – 00421).
2.
Математическая модель
2.1. Электродинамическая часть
Электродинамическая часть модели
основана на системе уравнений Максвелла в квазистационарном приближении (см.
[6])
 (2.1)
(2.1)

Здесь  - электропроводность, - электропроводность,  и и  - напряженности
электрического (в системе координат, в которой вещество покоится) и магнитного
полей, - напряженности
электрического (в системе координат, в которой вещество покоится) и магнитного
полей,  - плотность тока, - плотность тока,  - вектор скорости
движения лайнера. В рассматриваемом двумерном приближении векторные переменные имеют следующий вид: - вектор скорости
движения лайнера. В рассматриваемом двумерном приближении векторные переменные имеют следующий вид:  , ,  , ,  , то есть векторы скорости, напряженности электрического поля
и плотности тока лежат в плоскости рис.
1.3, а вектор напряженности магнитного поля направлен перпендикулярно плоскости
рис. 1.3. Это означает, что в системе имеет место электромагнитное поле TM типа. , то есть векторы скорости, напряженности электрического поля
и плотности тока лежат в плоскости рис.
1.3, а вектор напряженности магнитного поля направлен перпендикулярно плоскости
рис. 1.3. Это означает, что в системе имеет место электромагнитное поле TM типа.
В используемом приближении можно
выразить напряженность магнитного поля в диэлектрике через значения полных
токов, которые протекают через проводники. Суперпозиция магнитного поля,
созданного током  , текущим по индуктору, и поля, созданного током ( , текущим по индуктору, и поля, созданного током ( ), текущим по лайнеру, дает следующий результат: ), текущим по лайнеру, дает следующий результат:
 . (2.2) . (2.2)
Подобласти I, II, III показаны на рис. 1.3.
Для получения уравнения, описывающего
поле  в проводниках, выразим
из второго уравнения (2.1) напряженность магнитного поля и подставим в первое
уравнение. В итоге приходим к уравнению: в проводниках, выразим
из второго уравнения (2.1) напряженность магнитного поля и подставим в первое
уравнение. В итоге приходим к уравнению:
 ,
(2.3) ,
(2.3)
в котором используется полная производная по времени (см. [7])
 . .
Выберем
следующие начальное и граничные условия:
 , ,
 , ,  , ,  , ,
здесь  - границы лайнера, - границы лайнера,  - границы индуктора (см. рис. 1.3). - границы индуктора (см. рис. 1.3).
2.2. Уравнения
внешних электрических цепей
Параметры
внешних электрических цепей предполагаются сосредоточенными, так что для
описания цепей можно применять уравнения Кирхгоффа [8]. Они являются следствием
интегрирования первого уравнения (2.1) по плоскости и контуру данных цепей.
После применения формулы Стокса в
уравнениях появятся интегралы по границе области. В итоге уравнения для внешней электрической
цепи индуктора имеют следующий вид:
 или (2.4) или (2.4)
Второе
уравнение (2.4) получается из первого, если выразить интеграл по границе диэлектрика
через интегралы по границам проводников с помощью первого уравнения (2.1).
Коэффициент 2 появился вследствие учета симметрии области.
Аналогичные уравнения для цепи лайнера ( и и  - площади соответствующих областей) записываются в виде: - площади соответствующих областей) записываются в виде:
 или или
 (2.5) (2.5)
 . .
В уравнениях (2.4)-(2.5) L, R,
C - индуктивность, сопротивление
и емкость в цепи соответственно, I и U – сила тока в цепи и
напряжение на обкладках конденсатора (А – в цепи лайнера, В – индуктора).
Задача замыкается выбранными
начальными значениями для токов и напряжений.
2.3. Математическая
модель термоупругого тела
Рассмотрим
лайнер как изотропное сжимаемое
термоупругое твердое тело ([7, 9]). Пусть и и  – текущая и начальная
плотность материала лайнера, – текущая и начальная
плотность материала лайнера,  и и  – эйлеровые и лагранжевые
переменные, – эйлеровые и лагранжевые
переменные,  – компоненты вектора
перемещения ( – компоненты вектора
перемещения ( = 1, 2, 3 в общем случае, в данном – до 2: = 1, 2, 3 в общем случае, в данном – до 2:  , ,  ). В дальнейшем будем
использовать уравнения движения в лагранжевых переменных. ). В дальнейшем будем
использовать уравнения движения в лагранжевых переменных.
Тензор деформации и два
его первых инварианта имеют вид:

Здесь
использовано правило суммирования по повторяющимся индексам.
В
процессе движения возникают значительные растяжения лайнера, поэтому в тензоре
деформации учтены квадратичные слагаемые.
Уравнение движения в
форме Лагранжа записывается в форме:
 (2.6)
(2.6)
где  - сила Лоренца, действующая на тело, - сила Лоренца, действующая на тело,  - тензор напряжений Лагранжа. Для линейно-упругой среды он
задается следующим выражением (более подробно см. [5, 9]): - тензор напряжений Лагранжа. Для линейно-упругой среды он
задается следующим выражением (более подробно см. [5, 9]):
где
λ и μ – коэффициенты Ламе, β = (3 λ + 2 μ)  , - коэффициент линейного
теплового расширения. , - коэффициент линейного
теплового расширения.
Поставим
начальные условия

и граничные условия
 на на  , ,  на на , , 
на всей
границе лайнера ( - нормаль в лагранжевых переменных). - нормаль в лагранжевых переменных).
Уравнение энергии в
терминах энтропии представимо в виде:
 (2.7)
(2.7)
здесь  - энтропия на единицу
массы, - энтропия на единицу
массы,  - коэффициент
теплопроводности, - коэффициент
теплопроводности,  - мощность
тепловыделения. - мощность
тепловыделения.
Уравнение
(2.7) можно также записать в виде уравнения теплопроводности:
 (2.8)
(2.8)
где  – удельная объемная
теплоемкость при постоянной деформации. – удельная объемная
теплоемкость при постоянной деформации.
Дополним его начальным и граничными условиями
 , ,  . .
2.4
. Моделирование контакта лайнера с призмой
Главный интерес в модели представляет
описание контакта лайнера с подставкой, которая используется в
существующей лабораторной установке для
предотвращения разрыва ленты лайнера.
При моделировании первоначально ставилось условие прилипания лайнера к поверхности
опоры, т.е. принималось, что в точках касания  . Проведенные расчеты показали, что в такой постановке задачи
часть лайнера, расположенная на цилиндрической части опоры, остается
практически неподвижной и не растягивается. Ниже будут приведены результаты для
одного из подобных расчетов. . Проведенные расчеты показали, что в такой постановке задачи
часть лайнера, расположенная на цилиндрической части опоры, остается
практически неподвижной и не растягивается. Ниже будут приведены результаты для
одного из подобных расчетов.
В дальнейшем использовалось условие скольжения: в точке контакта нормальная составляющая
скорости лайнера и сила, действующая по направлению касательной к поверхности
опоры, равны нулю. При этом не учитывается трение ленты о поверхность. Соответствующие
уравнения в декартовой системе координат имеют вид:

 ,
(2.9) ,
(2.9)
где
 - вектор нормали к поверхности, а - вектор нормали к поверхности, а  - касательный вектор
(в лагранжевых координатах). - касательный вектор
(в лагранжевых координатах).
Если подставить в (2.9) выражение для
тензора напряжений, то получится очень
громоздкое выражение, с которым неудобно работать. Поэтому в точках контакта
вводится новая система координат  , которая получается поворотом старой системы координат , которая получается поворотом старой системы координат  на угол на угол  такой, что ось такой, что ось  направлена по нормали
к поверхности опоры, а ось направлена по нормали
к поверхности опоры, а ось  - по касательной к ней
(см. рис. 2.1). - по касательной к ней
(см. рис. 2.1).
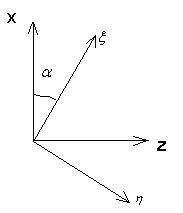
Рис. 2.1.
Новая система координат
Формулы преобразования координат
имеют форму:

 (2.10) (2.10)

В новой системе координат условия
контакта принимают более компактный вид:
 . .
2.5. Энергетические соотношения
Более подробно вывод этих формул изложен в [5]. В данном разделе приведены
только основные соотношения.
Баланс электромагнитной энергии в области, соответствующей половине
исходного сечения:
   =0. (2.11) =0. (2.11)
Закон
изменения энергии в цепи:
  (2.12) (2.12)
Сложив
уравнения (2.11) и (2.12), запишем закон изменения электромагнитной энергии во
всей системе, включая внешнюю цепь:

+ =0. (2.13) =0. (2.13)
Баланс
механической и внутренней энергии (U – внутренняя энергия на единицу
массы) задается выражением (см. [5]):
 . (2.14) . (2.14)
Если
сложить (2.13) и (2.14), учитывая  , то получим закон изменения полной энергии системы: , то получим закон изменения полной энергии системы:
+ .
(2.15) .
(2.15)
3. Метод
численного решения
Для
численного решения применяем метод конечных элементов (МКЭ). Вводим в области треугольную сетку. Так как напряженность магнитного
поля в диэлектрике выражается через токи, то ограничимся 2 сетками для 2 проводников,
независящими друг от друга. Поскольку лайнер движется, то точки соответствующей
сетки двигаются вместе с веществом. Разыскиваем неизвестные величины, используя
следующие базисы: стандартные кусочно-линейные функции  и кусочно-постоянные
функции и кусочно-постоянные
функции  , определенные на ячейках Дирихле (см. [10]). Тогда , определенные на ячейках Дирихле (см. [10]). Тогда
 или или  , ,
где  - значение функции с верхнего слоя по времени в -й точке. - значение функции с верхнего слоя по времени в -й точке.
Напряженность магнитного поля, температура и
обе составляющие скорости заданы в узлах сетки, а напряженность электрического
поля и плотность тока постоянны в пределах каждого сеточного треугольника.
Процесс
нахождения решения задачи на каждом временном слое состоит из последовательного выполнения итерационных
циклов для группы электродинамических уравнений, группы уравнений, описывающих
движение лайнера, и уравнения теплопроводности. Кроме того, проводится цикл
внешних итераций (для всей системы), по результатам которого и происходит
переход на следующий временной слой.
3.1. Система
конечномерных уравнений для напряженности магнитного поля в проводниках
Рассмотрим сначала область, занимаемую
лайнером (обозначим ее  ). В этой
области справедливо уравнение (2.3). Если применить к нему метод Галеркина (см.
[10]), то после несложных преобразований можно прийти к следующей дискретной
задаче: ). В этой
области справедливо уравнение (2.3). Если применить к нему метод Галеркина (см.
[10]), то после несложных преобразований можно прийти к следующей дискретной
задаче:
 (3.1) (3.1)
для
всех , соответствующих внутренним узлам, а также узлам на границах
и . Здесь и
далее  , ,  - площади ячеек
Дирихле на новом и старом слое соответственно. Значения искомой функции в узлах
сетки на оставшихся границах задаются равенствами: - площади ячеек
Дирихле на новом и старом слое соответственно. Значения искомой функции в узлах
сетки на оставшихся границах задаются равенствами:
 на на  , ,
 на на  . .
Аналогичную
процедуру можно проделать для индуктора (соответствующую область обозначим  ). В итоге
получаем, что значения определяются из
системы уравнений ). В итоге
получаем, что значения определяются из
системы уравнений
 (3.2) (3.2)
для
всех , соответствующих внутренним узлам, а также узлам на границах  и и  . Значения в оставшихся точках задаются равенствами: . Значения в оставшихся точках задаются равенствами:
 на на  , ,  на на  . .
Итоговая
система уравнений включает в себя
системы (3.1), (3.2) и уравнения
для значений функции в узлах, лежащих на границах  , ,  , , , , . Также в нее входят выражения для токов, получаемые
стандартной дискретизацией уравнений (2.4) и (2.5) с использованием неявной схемы (см. [11, 12]): . Также в нее входят выражения для токов, получаемые
стандартной дискретизацией уравнений (2.4) и (2.5) с использованием неявной схемы (см. [11, 12]):
 , ,
где  , ,  . .
3.2. Система
конечномерных уравнений для уравнения движения
Движение лайнера описывается уравнением (2.6), которое
можно записать в виде системы

 (3.3)
(3.3)
Дискретизацию системы (3.3) проводим в терминах величины  . При этом . При этом  . После нахождения решения происходит переход к искомому
значению . После нахождения решения происходит переход к искомому
значению  . Ко второму уравнению системы (3.3) применяем метод
Галеркина (см. [10]). В дальнейшем при выполнении итераций квадратичные
слагаемые, входящие в выражение для тензора деформации, берем с предыдущей
внутренней итерации. Для аппроксимации температуры в -м треугольнике используется выражение . Ко второму уравнению системы (3.3) применяем метод
Галеркина (см. [10]). В дальнейшем при выполнении итераций квадратичные
слагаемые, входящие в выражение для тензора деформации, берем с предыдущей
внутренней итерации. Для аппроксимации температуры в -м треугольнике используется выражение  (усреднение по
значениям в вершинах). Оно считается известным на данной внешней итерации. (усреднение по
значениям в вершинах). Оно считается известным на данной внешней итерации.
В
точках контакта лайнера с поверхностью опоры
уравнения движения (2.6) записываются в новой системе координат,
задаваемой соотношениями (2.9). Учитывая несложное преобразование

 , ,
получаем следующие уравнения для граничных точек:
 . .
Для
удобства делаем обратную замену координат, при этом учитываются равенства:



Введение
одномерного массива  , такого, что , такого, что  (значение (значение  в -м узле) и в -м узле) и  (значение (значение  в -м узле), позволяет записать систему линейных уравнений в
виде матричного уравнения (более подробно см. [5]) в -м узле), позволяет записать систему линейных уравнений в
виде матричного уравнения (более подробно см. [5])  . .
4. Физические параметры
Все расчеты проводятся в безразмерном виде.
Для получения размерной величины f по безразмерной f* ее
необходимо умножить на масштабный коэффициент f0 (см. [6]). Соответственно для
получения безразмерной величины, задаваемой в программе, размерную величину
нужно поделить на масштаб f0.
Всюду далее звездочки у безразмерных величин опущены. Ниже даны масштабные
коэффициенты для основных физических величин.
x0 = 10 см = 0.1 м.
t0= 10-3 сек = 1 мс.
v0 = x0/ t0
= 104 см/сек = 0.1 км/сек = 100 м/сек.
ρ0 = 4 г/см3.
m0 = 4 кг = 4 103 г.
T0 = 200 град К.
I0 = 2 106 а = 2 ма.
U0 =
20 в.
R0 =
10-5 ом.
C0 = 102 ф.
L0 = 10-8 гн.
F0 = 4 105 н.
Приведем физические параметры задачи,
которые являются общими для всех вариантов расчетов.
Начальная температура T = 1.45. Начальная
скорость лайнера равна нулю. Размеры
конструкции в соответствии с рис. 1.3 (для одной четвертой части ): высота индуктора равна 1.5, его длина – 4,
высота лайнера равна 0.02, расстояние между лайнером и индуктором по высоте в
начальный момент времени равно 0.02.
Радиус цилиндрической части опоры равен 0.96. Угол наклона призмы для
всех вариантов расчета брался равным 300.
Параметры материала индуктора взяты равными
соответствующим величинам стали: плотность ρ = 1.95, теплоемкость cv
= 9.21, теплопроводность κ = 1.998 10-5, электропроводность
σ = 52.9 при 00 C.
Параметры материала лайнера взяты равными
соответствующим величинам алюминия: плотность ρ = 0.63525, теплоемкость cv
= 18.037, теплопроводность κ = 1.035 10-4, электропроводность
σ = 40.66 при 00 C.
Для обоих материалов электропроводность
взята в виде функции температуры вида σ = σs / (1 + ασ
T) c соответствующими параметрами из [13].
Параметры электрической цепи индуктора
составили: индуктивность LB = 20.0, емкость СB = 3.1 10–5,
сопротивление RB = 1.2 102.
Начальное напряжение на обкладках
конденсатора взято равным 2000.0, начальный ток – нулевой.
Параметры электрической цепи лайнера составили:
индуктивность
 = 2.5, емкость = 2.5, емкость  = 1000, сопротивление = 1000, сопротивление  = 10-5. = 10-5.
Начальное напряжение и начальный ток равны
нулю.
Во всех трех расчетах момент замыкания цепи
лайнера t0 = 0.06.
Число точек
сетки в области лайнера составило
5264, при этом получено 8924 соответствующих треугольников. Аналогичные числа
для области индуктора – 223/381.
5. Результаты расчетов
Ниже представлены результаты нескольких расчетов с разными наборами
параметров.
5.1. Вариант 1
Длина ускоряемого лайнера по направлению y – ly = 3.0. В качестве условия
контакта лайнера и его опоры поставлено условие прилипания. Расчет продолжался до
момента времени t = 0.1360, в
который координата центра масс составила
x = 0.5.
Максимальная (по абсолютной величине)
скорость центра масс лайнера за время ускорения составила  = -3.3, максимальная температура - T = 2.3, интегральная ускоряющая сила (в направлении x) изменялась от 0 до -21.1, ток в цепи индуктора
изменялся в пределах от -1.29 до 2.02, напряжение
на обкладках конденсатора в цепи индуктора менялось от -1455 до 2000.0. = -3.3, максимальная температура - T = 2.3, интегральная ускоряющая сила (в направлении x) изменялась от 0 до -21.1, ток в цепи индуктора
изменялся в пределах от -1.29 до 2.02, напряжение
на обкладках конденсатора в цепи индуктора менялось от -1455 до 2000.0.
На рис. 5.1 представлены графики сосредоточенной информации о расчете, характеризующие процесс в целом. Это,
соответственно (слева направо, сверху вниз), зависимости от времени интегральной
силы (силы Лоренца, проинтегрированной по площади лайнера), скорости центра
масс лайнера, координаты центра масс лайнера, полной энергии, напряжения и силы
тока в цепи лайнера и в цепи индуктора.
|
FLX
|
VX
|
|
X центра масс
|
Energy
|
|
|
|
|
UA
|
IA
|
|
UB
|
IB
|
|
Рис. 5.1. Графики сосредоточенной информации
|
На рис. 5.2
представлены графики зависимостей энергии от времени. Это, соответственно
(слева направо, сверху вниз), зависимости внутренней и кинетической энергии
лайнера, энергии магнитного поля в катушках индуктивности, энергии
электрического поля в конденсаторах во
внешних цепях и энергии магнитного поля в ускорителе. Сумма всех перечисленных энергий составляет
полную энергию, график которой представлен на рис. 5.1.
|
Кинетическая
энергия лайнера
|
Внутренняя
энергия лайнера
|
|
Энергия магнитного
поля в катушках индуктивности
|
Энергия
электрического поля в конденсаторах
|
|
Энергия магнитного поля в ускорителе
|
Рис. 5.2
Графики зависимостей энергии от времени
На рис.
5.3 показано положение лайнера в разные моменты времени. Из приведенных
графиков видно, что лента достигает призмы и начинает скользить по ней. В
процессе движения лайнер растягивается, при этом растяжение происходит достаточно равномерно
по всей его длине. Та часть ленты, которая находится левее призмы, перемещается
вправо, благодаря силам упругости.
|
t=0.0135
|
t=0.0535
|
|
t=0.0775
|
t=0.0935
|
|
t=0.1090
|
t=0.1360
|
|
Рис. 5.3 Положение
лайнера в разные моменты времени (оттенками серого показана
скорость по оси х)
|
Как видно из рис. 1.1.Б, опора лайнера имеет форму, обеспечивающую
гладкий переход цилиндрической
части в призму. При отсутствии такой гладкости в точке перехода не определена нормаль к
поверхности опоры, вследствие чего в расчетах
возникали перевороты ячеек сетки,
делающие дальнейшие расчеты невозможными.
|
t=0.0535
|
t=0.1290
|
|
Рис. 5.4 Положение
лайнера в месте закругления опоры (оттенками серого показана
скорость по оси z)
|
В
дальнейших расчетах радиус закругления, обеспечивающего гладкость перехода, брался равным высоте лайнера. На рис. 5.4
изображено, как лента лайнера ложится на данное закругление.
5.2. Вариант 2
Все
характеристики варианта аналогичны таковым для варианта 1. В отличие от него в
качестве условия контакта лайнера и его опоры поставлено условие прилипания.
|
FLX
|
VX
|
|
X центра масс
|
Energy
|
|
UB
|
IB
|
|
Рис. 5.5. Графики сосредоточенной информации
|
На рис. 5.5 представлены графики сосредоточенной информации о расчете, характеризующие процесс в целом. Способ представления аналогичен таковому для
рис. 5.1.
Как
видно на рис. 5.6, в отличие от предыдущего варианта лайнер не долетает до
нижней границы области, а начинает двигаться вверх. Это вызвано тем, что силы
упругости с какого-то момента времени начинают преобладать над силой давления
магнитного поля, толкающей лайнер вниз. Поведение магнитного поля осталось
практически неизменным по сравнению с
вариантом 1. Следовательно, при условии прилипания лайнеру требуется придать
большее ускорение для того, чтобы он достиг нижней части расчетной области, чем
при условии скольжения. Возможное
объяснение такого поведения состоит в том, что часть лайнера, находящаяся на
опоре, не дает вклада в растяжение
ленты. Поэтому оставшаяся часть растягивается сильнее, в результате чего
возникают большие напряжения. Расчет
продолжался до момента времени t = 0.2223, в который лента лайнера достигает
границы индуктора.
|
t=0.0135
|
t=0.0616
|
|
t=0.0935
|
t=0.1095
|
|
t=0.1176
|
t=0.1248
|
|
t=0.1405
|
t=0.1705
|
|
t=0.1945
|
t=0.2223
|
|
Рис. 5.6 Положение
лайнера в разные моменты времени (оттенками серого показана
скорость по оси х)
|
|
t=0.1095
|
t=0.1945
|
|
Рис. 5.7 Положение
лайнера в месте закругления опоры (оттенками серого показана
скорость по оси х)
|
На рис.
5.7 показано, как лента лайнера ложится на поверхность опоры вблизи закругления.
В отличие от первого варианта в данном расчете лайнер достигает
закругления, прилипает к нему, но в дальнейшем не ложится на призму.
5.3. Вариант 3
В отличие от предыдущих вариантов длина ускоряемого лайнера
по направлению y – ly = 5.0. В качестве
условия контакта поставлено условие скольжения. Расчет продолжался до момента
времени t = 0.3597, в
который лайнер достигает верхней границы
индуктора.
|
FLX
|
VX
|
|
X центра масс
|
Energy
|
|
UA
|
IA
|
|
UB
|
IB
|
|
Рис. 5.8. Графики сосредоточенной информации
|
На рис. 5.8 представлены графики сосредоточенной информации о расчете, характеризующие процесс в целом, в виде,
аналогичном рис. 5.1, 5.5.
Как и в варианте 2, лайнер не долетает до нижнего края
области, а начинает двигаться вверх. Но в этот раз причины такого поведения
другие. В [5] приведены зависимости силы давления магнитного поля и скорости центра
масс лайнера от протяженности системы в третьем направлении, т.е. массы лайнера. Для задачи с контактом остается
справедливым утверждение, что интегральная сила давления магнитного поля
обратно пропорциональна ly (это видно на графиках рис. 5.1 и 5.8). Поэтому скорость центра масс
с ростом ly также уменьшается, но
указать точную функциональную зависимость уже затруднительно. Серия проведенных
расчетов показала, что существует критическое значение массы лайнера (т.е. ly). Если лайнер тяжелее такой критической
массы, то давления магнитного поля не хватает для того, чтобы придать ему
достаточное ускорение. Для условия прилипания это критическое значение меньше,
чем для условия скольжения.
На рис.
5.9 показано положение лайнера в разные
моменты времени. Из приведенных графиков видно, что лайнер ложится на опору и
начинает скользить по ней. Когда под действием сил упругости лайнер теряет
приобретенную скорость и меняет направление движения, то та часть ленты,
которая переместилась на призму, двигается назад. В конце расчета лайнер уже не
контактирует с призмой и закруглением
опоры.
|
t=0.0135
|
t=0.1200
|
|
t=0.1860
|
t=0.2
|
|
t=0.24
|
t=0.28
|
|
t=0.31
|
t=0.3597
|
|
Рис. 5.9 Положение
лайнера в месте закругления опоры (оттенками серого показана
скорость по оси х)
|
Движение ленты лайнера можно
описать следующим образом. До момента времени t=0.186 лента летит вниз под действием давления магнитного
поля. Затем сила упругости толкает лайнер вверх. В процессе движения вследствие
контакта с опорой в лайнере образуются волны возмущения. Скорость их распространения соответствует скорости распространения
поперечных волн в термоупругой среде (см. [7]).
На оси симметрии (правой границе расчетной области) две волны, которые
перемещаются по двум половинам ленты,
сталкиваются и отражаются друг от друга. Отраженная волна достигает
закругления и, снова отражаясь, опять начинает двигаться вправо. На графиках,
соответствующих моментам времени t=0.31 и t=0.3412, хорошо видна последняя волна.
6.
Заключение
В
работе описана математическая и
численная модели процесса электромагнитного ускорения пластинчатого лайнера в
устройствах обострения мощности. Главными ее характеристиками являются
пространственная двумерность, представление материала лайнера в виде упругого
тела и учет контакта ленты лайнера с опорой, расположенной в торцевой части
ускорителя. При моделировании контакта использовались два условия: условие прилипания
ленты к поверхности опоры и условие скольжения лайнера по ней.
На
основе представленных вычислительных алгоритмов разработан соответствующий
программный комплекс. Ряд полученных результатов представлен в работе.
Основной
вывод из проведенных расчетов состоит в определяющей поведение лайнера роли
давления магнитного поля. Интегральная ускоряющая сила обратно
пропорциональна длине системы в направлении оси y - ly. Существует
критическое значение ly : если длина (значит, и масса) лайнера
больше критической, то магнитное поле не придает лайнеру достаточного
ускорения. В итоге лайнер, не достигнув нижней границы расчетной области, под
действием сил упругости начинает двигаться вверх. Для условия прилипания это
критическое значение меньше, чем для условия скольжения.
Литература
1.
Э.А. Азизов, С. Г. Алиханов, Е.П. Велихов, М.П. Галанин, В.А. Глухих,
Е.В. Грабовский, А. Н. Грибов, Г.И. Долгачев, А.М. Житлухин, Ю.Г.
Калинин, А.С. Кингсеп, А.И. Кормилицын, В.П. Ковалев, М.К. Крылов, В.Г.
Кучинский, В.А. Левашов, А.П. Лотоцкий, С.Л. Недосеев, О.П. Печерский, В.Д.
Письменный, Ю.П. Попов, Г.П. Рыкованов, В.П. Смирнов, Ю.А. Халимуллин, В.И.
Четвертков. Проект «Байкал». - Отработка схемы генерации электрического
импульса // Вопросы атомной науки и техники. Сер. Термоядерный синтез. 2001. №.
3. С.с. 3 - 17.
2.
М.П. Галанин, А.П. Лотоцкий. Моделирование разгона и
торможения лайнера в устройствах обострения мощности // Радиотехника и
электроника. 2005. Т. 50. №2. С. 256 - 264.
3.
М.П. Галанин, Е. В. Грабовский, А. П. Лотоцкий, Т. Г.
Суфиев. Математическое моделирование
электромагнитного ускорения проводящей пластины в компрессоре потока // Препринт
ИПМ им. М.В. Келдыша РАН. 2005. № 138.
29 с.
4.
М.П. Галанин, А.П. Лотоцкий, В.Ф. Левашов. Расчет электродинамического
ускорения плоских пластин в лабораторном магнитокумулятивном генераторе // Препринт
ИПМ им. М.В. Келдыша РАН. 2001. № 3. 30 с.
5.
М.П. Галанин,
А.П. Лотоцкий, А.С. Родин.
Математическое моделирование электромагнитного ускорения лайнера в различных
двумерных приближениях // Препринт ИПМ им. М.В. Келдыша РАН. 2007. № 4. 32 с.
6.
М.П. Галанин, Ю.П. Попов. Квазистационарные
электромагнитные поля в неоднородных средах. Математическое моделирование. М.:
Наука, Физматлит. 1995. 320 с.
7.
В.С. Зарубин, Г.Н. Кувыркин. Математические модели
термомеханики. М.: Физматлит. 2002. 168 с.
8.
И.Е. Тамм. Основы теории электричества. М.: Наука.
1989. 504 с.
9.
Д. Бленд. Нелинейная динамическая теория упругости. М.:
Мир. 1972. 184 с.
10.
В.К. Агошков, Г.И. Марчук. Введение в
проекционно-сеточные методы. М.: Наука, Физматлит. 1981. 416 с.
11.
А.А. Самарский. Теория разностных схем. М.: Наука.
1983. 280 с.
12.
А.А. Самарский, А.В. Гулин. Численные методы. М.: Наука. 1989. 438 с.
13.
Физические величины. Справочник. Под ред. И.С.
Григорьева, Е.З. Мейлахова. М.: Энергоатомиздат. 1991. 1232 с.
14.
М.П. Галанин, С.С. Храмцовский. Решение пространственно
трехмерных задач электромагнитного ускорения в системе длинных проводников // Препринт ИПМ им. М. В. Келдыша РАН. 1998.
№ 29. 20 с.
|