Математическое моделирование гидравлической системы управления экзоскелетона
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Вращающий момент в суставе (Н*м) |
Вес гидро-двигателя (кг) |
Кол-во приводов |
Общий вес гидро-двигателей |
|
Вес гидродвигателя плеча |
296.1 |
10.00 |
2 |
20.00 |
|
Вес звена от плеча до
локтя |
- |
4.29 |
2 |
8.58 |
|
Вес гидродвигателя локтя |
164.4 |
6.00 |
2 |
12.00 |
|
Вес звена от локтя до кисти |
- |
2.16 |
2 |
4.32 |
|
Вес
гидродвигателя кисти |
- |
3.00 |
2 |
6.00 |
|
Вес
руки |
- |
3.00 |
2 |
6.00 |
|
Вес
спины |
- |
5.61 |
1 |
5.61 |
|
Вес
компонентов и спины |
- |
20.00 |
1 |
20.00 |
|
Вес
гидродвигателя бедра |
403.8 |
15.00 |
2 |
30.00 |
|
Weight of link from hip to knee cap (thigh) |
- |
4.67 |
2 |
9.34 |
|
Вес
гидродвигателя колена |
370.1 |
12.00 |
2 |
24.00 |
|
Вес
звена между коленом и голенью |
- |
4.39 |
2 |
8.78 |
|
Вес
гидродвигателя голени |
370.1 |
12.00 |
2 |
24.00 |
|
Вес
ступни |
- |
2.50 |
2 |
5.00 |
|
|
|
|
|
|
|
Общий вес экзоскелетона (кг) |
183.63 |
|||
Насосная
станция.
Насосная станция включает в себя насос с регулятором давления. На рис. 4а,б
представлена принципиальная схема насоса с регулятором давления фирмы Rexroth A10 VSODR [9]. Регулятор давления
служит для поддержания постоянного давления нагнетания насоса, при этом насос
поставляет только то количество жидкости, которое необходимо гидроприводам.
Поэтому данный насос имеет достаточно хорошие энергетические характеристики (рис.5а,б). Давление же будет постоянным и определяется
характеристиками пружины распределителя ограничителя давления. Для улучшения
габаритных характеристик и компоновки
гидропривода, а также с целью улучшения теплового баланса, целесообразно
разместить насос в баке с рабочей жидкостью (рис. 6).
В качестве
регулирующей аппаратуры применяются электрогидравлические усилители (ЭГУ) типа
сопло-заслонка (серво клапан), которые широко распространены в робототехнике и
авиации. Они имеют малые размеры (приблизительно 80х46х80 мм) и массу (~0.64
кг), высокие динамические характеристики. Наиболее широкое распространение в
технике получили электрогидравлические усилители с механической обратной
связью. На рис.7 приведена конструктивная схема ЭГУ фирмы Rexroth.
Электрогидравлический
усилитель представляет собой совокупность электромеханического преобразователя
(ЭМП) 1, гидравлического усилителя типа сопло-заслонка 2 и золотника, который
соединён с заслонкой при помощи упругого стержня. Сопла и заслонки вместе
представляют собой регулируемые дроссели, сопротивление которых может
изменяться при помощи изменения расстояния между соплами и заслонкой.
Электрический
сигнал подаётся на обмотки ЭМП, под действием электромагнитной силы, сердечник
6 поворачивается на определённый угол, который зависит от уровня входного
напряжения. Заслонка 7, скреплённая с сердечником также поворачивается, при
этом изменяется расстояние между заслонкой и соплами. При этом изменяются
сопротивления регулируемых дросселей, что приводит к изменению перепада
давлений на торцах золотника 3. Под действием это перепада золотник начинает
смещаться от нейтрального положения, тем самым, соединяя линии нагнетания и
слива с полостями гидродвигателя. Золотник смещается до тех пор, пока момент от
стержня не станет равным электромагнитному моменту ЭМП. Смещение золотника, а
следовательно и поток рабочей жидкости через золотник пропорциональны входному
электрическому сигналу. Расчетная схема ЭГУ приведена на рис. 8.
Поскольку
каждое звено экзоскелетона осуществляет независимое движение, то каждый
гидродвигатель должен иметь независимый алгоритм управления движением. Поэтому
для управления необходимо использовать 10 ЭГУ, по числу активных степеней
подвижности.
Принципиальная
гидравлическая схема экзоскелетона приведена на рис. 9.
Она включает в себя насос с регулятором давления, исполнительные
гидродвигатели, электрогидравлические усилители. На рис.10 приведена структура
системы управления гидродвигателя.
Массы
элементов гидропривода экзоскелетона приведены в таблице №2.
Таблица №2
|
Название Привода |
Вес гидроцилиндра кг |
Вес ЭГУ и монтажной плиты кг |
Вес насоса и бака с рабочей жидкостью |
Вес гидравличес-кой системы |
|
Колено |
2.02 |
2.64 |
- |
|
|
Бедро |
2.06 |
2.64 |
- |
|
|
Голень |
1.71 |
2.64 |
- |
|
|
Плечо |
1.91 |
2.64 |
- |
|
|
Плечо |
2.132 |
2.64 |
- |
|
|
Общий вес |
9.832x2=19.664 |
13.2x2=26.4 |
8+10=18 |
64.1 |
Общая масса
гидропривода экзоскелетона без учёта массы трубопроводов равна ~64.1 кг, что на
2. Математическая модель гидравлической
системы экзоскелетона
2.1. Электрогидравлический усилитель
Уравнение напряжений в электрической цепи электромагнита
 , (2.1) где
, (2.1) где ![]() напряжение на выходе электронного усилителя;
напряжение на выходе электронного усилителя; ![]() активное сопротивление
обмотки управления электромагнита;
активное сопротивление
обмотки управления электромагнита; ![]() индуктивность обмотки
управления электромагнита;
индуктивность обмотки
управления электромагнита; ![]() коэффициент
противо-ЭДС;
коэффициент
противо-ЭДС; ![]() ток в обмотке управления;
ток в обмотке управления; ![]() смещение пилотного золотника и жёстко связанного с ним якоря
электромагнита.
смещение пилотного золотника и жёстко связанного с ним якоря
электромагнита.
Значение коэффициента противо-ЭДС определяют по соотношению
 , (2.2)
, (2.2)
где ![]() длина средней линии якоря;
длина средней линии якоря; ![]() ;
; ![]() воздушный зазор между якорем и сердечником.
воздушный зазор между якорем и сердечником.
Уравнение движения плунжера пилотного золотника
 , (2.3)
, (2.3)
где ![]() момент инерции якоря электромагнита;
момент инерции якоря электромагнита; ![]() коэффициент, учитывающий вязкое демпфирование якоря;
коэффициент, учитывающий вязкое демпфирование якоря; ![]() момент гидродинами-ческой
силы
момент гидродинами-ческой
силы ![]() ;
; ![]() сила электромагнита;
сила электромагнита; ![]() жесткость пружины подвески заслонки,
жесткость пружины подвески заслонки, ![]() .
.
![]() , где
, где ![]() сила, изгибающая стержень при повороте заслонки и перемещении
золотника.
сила, изгибающая стержень при повороте заслонки и перемещении
золотника.
 , где
, где ![]() модуль упругости
материала, из которого изготовлен стержень,
модуль упругости
материала, из которого изготовлен стержень, ![]() момент инерции сечения стержня относительно главной
центральной оси, перпендикулярной к плоскости изгибающей силы,
момент инерции сечения стержня относительно главной
центральной оси, перпендикулярной к плоскости изгибающей силы, ![]() прогиб конца стержня, равен сумме прогибов, вызванных
поворотом заслонки относительно центра «О» на угол
прогиб конца стержня, равен сумме прогибов, вызванных
поворотом заслонки относительно центра «О» на угол ![]() и перемещением
и перемещением ![]() золотника,
золотника, ![]() .
.
Уравнение
расходов рабочей жидкости в управляющем каскаде
 ,
,
 , (2.4)
, (2.4)
где ![]() расходы рабочей жидкости, обеспечивающие управление основным
золотником;
расходы рабочей жидкости, обеспечивающие управление основным
золотником; ![]() площадь торца плунжера основного золотника;
площадь торца плунжера основного золотника; ![]() перемещение плунжера
основного золотника;
перемещение плунжера
основного золотника;  коэффициент, учитывающий сжимаемость рабочей жидкости в
торцовых камерах основного золотника;
коэффициент, учитывающий сжимаемость рабочей жидкости в
торцовых камерах основного золотника; ![]() объём торцевой камеры золотника;
объём торцевой камеры золотника; ![]() модуль объёмной упругости рабочей жидкости;
модуль объёмной упругости рабочей жидкости; ![]() давление жидкости в камерах управления под торцами плунжера
основного золотника.
давление жидкости в камерах управления под торцами плунжера
основного золотника.
Расход ![]() определяется известными из гидравлики
соотношениями:
определяется известными из гидравлики
соотношениями:
![]()
![]() где
где  проводимость дросселя гидроусилителя;
проводимость дросселя гидроусилителя; ![]() давление насоса;
давление насоса; ![]() коэффициент расхода жидкости через дроссель;
коэффициент расхода жидкости через дроссель; ![]() площадь дросселя,
площадь дросселя, ![]() удельная проводимость сопла при нейтральном положении
заслонки,
удельная проводимость сопла при нейтральном положении
заслонки,  ,
,  ,
, ![]() функция, определяющая
проходное сечение между торцом сопла и заслонкой,
функция, определяющая
проходное сечение между торцом сопла и заслонкой, ![]() перемещение заслонки,
перемещение заслонки, ![]() расстояние от сопла до заслонки при нейтральном положении.
расстояние от сопла до заслонки при нейтральном положении.
Уравнение движения золотника ЭГУ
 (2.5)
(2.5)
где ![]() масса золотника;
масса золотника; ![]() коэффициент, учитывающий вязкое трение в зазоре между
плунжером основного золотника и гильзой;
коэффициент, учитывающий вязкое трение в зазоре между
плунжером основного золотника и гильзой; ![]() жесткость пружины основного золотника;
жесткость пружины основного золотника; ![]() гидродинамическая сила, действующая на плунжер основного
золотника со стороны рабочей жидкости;
гидродинамическая сила, действующая на плунжер основного
золотника со стороны рабочей жидкости; ![]() сила вязкого трения действующая на плунжер основного
золотника;
сила вязкого трения действующая на плунжер основного
золотника; ![]() перепад давления рабочей жидкости на торцах плунжера
основного золотника;
перепад давления рабочей жидкости на торцах плунжера
основного золотника; ![]() площадь торца плунжера золотника.
площадь торца плунжера золотника.
Уравнение
расхода жидкости через основной золотник


где ![]() коэффициент расхода
окна золотника;
коэффициент расхода
окна золотника; ![]() диаметр плунжера
основного золотника;
диаметр плунжера
основного золотника; ![]() перемещение плунжера
золотника;
перемещение плунжера
золотника; ![]() коэффициент перекрытия
гильзы золотника;
коэффициент перекрытия
гильзы золотника; ![]() давление насоса;
давление насоса; ![]() давление в полостях
гидродвигателя.
давление в полостях
гидродвигателя.
2.2. Гидроцилиндр
Уравнение давлений в полостях гидроцилиндра
 (2.6)
(2.6)
Здесь ![]() площадь поршня гидроцилиндра,
площадь поршня гидроцилиндра, ![]() площадь штоковой поверхности,
площадь штоковой поверхности, ![]() - упругость рабочей
жидкости,
- упругость рабочей
жидкости, ![]() - объём жидкости под
торцом поршня гидродвигателя,
- объём жидкости под
торцом поршня гидродвигателя, ![]() - коэффициент
сжимаемости рабочей жидкости.
- коэффициент
сжимаемости рабочей жидкости.
Уравнение движения гидродвигателя
 , (2.7)
, (2.7)
где ![]() масса звена прикреплённого к гидроцилиндру и поршня
гидроцилиндра;
масса звена прикреплённого к гидроцилиндру и поршня
гидроцилиндра; ![]() перемещение поршня гидроцилиндра,
перемещение поршня гидроцилиндра, ![]() коэффициент трения
гидродвигателя,
коэффициент трения
гидродвигателя, ![]() давление в полостях гидро-цилиндра,
давление в полостях гидро-цилиндра, ![]() внешняя сила, приложенная к штоку гидроцилиндра.
внешняя сила, приложенная к штоку гидроцилиндра.
2.3. Насос с
регулятором давления
Схема насоса с
регулятором давления приведена на рис.7. Подача насоса ![]() определяется соотношением:
определяется соотношением:
 , (2.8)
, (2.8)
где ![]() характерный объём насоса;
характерный объём насоса; ![]() максимальный угол поворота шайбы;
максимальный угол поворота шайбы; ![]() угловая скорость вращения вала насоса;
угловая скорость вращения вала насоса; ![]() текущее значение угла поворота шайбы насоса.
текущее значение угла поворота шайбы насоса.
Зависимость между
перемещениями поршня управляющего гидроцилиндра и углом наклона шайбы насоса
определяется соотношением:
 , (2.9)
, (2.9)
где ![]() координата, определяющая положение поршня гидроцилиндра;
координата, определяющая положение поршня гидроцилиндра; ![]() максимальное значение, которое может принимать
максимальное значение, которое может принимать ![]() ;
; ![]() радиус опорной шайбы насоса.
радиус опорной шайбы насоса.
Трубопроводы, соединяющие насос с гидроцилиндрами, считаем достаточно короткими, чтобы процессы в них можно было рассматривать без учёта распределённости параметров рабочей среды по длине гидролинии. Тогда, исходя из условия неразрывности течения жидкости, уравнение расходов в напорной гидролинии можно записать в виде:
 (2.10)
(2.10)
где ![]() подача насоса,
подача насоса, ![]() расход, необходимый для работы гидроприводов;
расход, необходимый для работы гидроприводов; ![]() расход жидкости, идущей на управление;
расход жидкости, идущей на управление; ![]() коэффициент,
учитывающий сжимаемость рабочей жидкости в трубопроводах;
коэффициент,
учитывающий сжимаемость рабочей жидкости в трубопроводах; ![]() давление насоса.
давление насоса.
Расход жидкости, необходимый для работы
гидроприводов:
 (2.11)
(2.11)
где ![]() расход, потребляемый
расход, потребляемый ![]() гидроприводом;
гидроприводом; ![]() число гидроприводов, подключенных к насосу.
число гидроприводов, подключенных к насосу.
Уравнение
движения плунжера ограничителя давления:
 , (2.12)
, (2.12)
где ![]() масса плунжера и присоединенных к нему подвижных частей
золотника ограничителя давления;
масса плунжера и присоединенных к нему подвижных частей
золотника ограничителя давления; ![]() перемещение плунжера золотника ограничителя давления;
перемещение плунжера золотника ограничителя давления; ![]() коэффициент, учитывающий вязкое трение в зазоре между
плунжером золотника и гильзой;
коэффициент, учитывающий вязкое трение в зазоре между
плунжером золотника и гильзой; ![]() жесткость пружины
ограничителя давления;
жесткость пружины
ограничителя давления; ![]() сила предварительного поджатия пружины;
сила предварительного поджатия пружины; ![]() гидродинамическая сила, действующая на золотник со стороны
рабочей жидкости;
гидродинамическая сила, действующая на золотник со стороны
рабочей жидкости; ![]() площадь торца плунжера золотника ограничителя давления.
площадь торца плунжера золотника ограничителя давления.
Уравнение
движения шайбы насоса и цилиндров управления
 , (2.13)
, (2.13)
где ![]() массы поршней гидроцилиндров управления и присоединенных к
ним подвижных частей механизма регулировки подачи насоса;
массы поршней гидроцилиндров управления и присоединенных к
ним подвижных частей механизма регулировки подачи насоса; ![]() коэффициенты вязкого трения в зазорах между поршнями и
гильзами цилиндров управления;
коэффициенты вязкого трения в зазорах между поршнями и
гильзами цилиндров управления; ![]() жёсткость пружины гидроцилиндра управления №1;
жёсткость пружины гидроцилиндра управления №1; ![]() сила предварительного поджатия пружины;
сила предварительного поджатия пружины; ![]() площади поршней гидроцилиндров управления;
площади поршней гидроцилиндров управления; ![]() суммарный момент сопротивления, приложенный к органу
регулирования насоса,
суммарный момент сопротивления, приложенный к органу
регулирования насоса, ![]() перемещение штока гидроцилиндра управления,
перемещение штока гидроцилиндра управления, ![]() давление в полости цилиндра управления.
давление в полости цилиндра управления.
3. Результаты моделирования
Каждая нога экзоскелетона
имеет три активных степени подвижности. Соответственно на одну ногу приходится
три исполнительных гидроцилиндра и три ЭГУ.
На одну руку приходится два
гидроцилиндра и два ЭГУ. Таким образом, экзоскелетон включает в себя 10
гидроцилиндров. Все они питаются от одного насоса.
Система уравнений,
описывающих работу гидроприводов двух ног, двух рук и насоса с регулятором
давления, представляет собой систему обыкновенных дифференциальных уравнений
(ОДУ) порядка 116, записанных в нормальной форме Коши. Для решения системы ОДУ
использовался метод интегрирования
Рунге-Кутты в модификации Мерсона.
Для определения адекватности
составленных математических моделей элементов, входящих в гидропривод, были
проведено математическое моделирование отдельных элементов, в частности ЭГУ
фирмы Rexroth. Результаты моделирования ЭГУ были сравнены с
характеристиками ЭГУ взятыми из каталога.
Характеристики ЭГУ фирмы Rexroth
приведены на рис.11, которые представляют собой
реакцию ЭГУ на ступенчатый входной электрический сигнал при различных значениях
давления питания.
Основными характеристиками
переходного процесса является время переходного процесса и его вид. На рис.12 приведена аналогичная характеристика, полученная при моделировании
ЭГУ.
На вход ЭГУ подавался
ступенчатый сигнал. Давление питания ЭГУ при этом составляло 210 бар.
Из графика видно, что
характер и время переходного процесса, полученные при моделировании работы ЭГУ
соответствуют экспериментальным данным, приведённым в каталоге для данного ЭГУ.
Программа для моделирования
гидравлической системы управления экзоскелетона позволяет задавать входное
напряжение в виде ступенчатого воздействия или в виде гармонического сигнала.
При
задании усилий, действующих на исполнительные гидродвигатели можно выбирать
либо постоянную нагрузку, либо меняющуюся по гармоническому закону.
Нагрузки,
которые действуют на исполнительные гидроцилиндры экзоскелетона при движении,
получены из данных RRC Nanyang Technological University. В таблице №1
приведены моменты в каждом из суставов. Исходя из геометрических размеров
звеньев экзоскелетона, были определены усилия, действующие на гидроцилиндры.
Если считать, что моменты, приведённые в материалах RRC, имеют максимальное
значение, то расчёт проведён для положений звеньев экзоскелетона, при котором в
суставах возникают максимальные моменты. Для ног это положение, когда угол в
коленном суставе равен 90°.
Таблица
№3
|
Наименование звена |
Величина момента, Н*м |
Величина силы, кН |
|
Колено |
370.1 |
2.96 |
|
Бедро |
403.8 |
4.038 |
|
Голень |
370.1 |
2.96 |
|
Плечо |
296.1 |
4.23 |
|
Локоть |
164.4 |
2.342 |
На рис. 13-22 приведены
результаты моделирования работы гидропривода экзоскелетона. Для моделирования
были выбраны два режима движения
характерных для человека.
Первый режим соответствует
вставанию человека из полусидящего положения и одновременного поднятия рук.
Движение осуществляется из положения,
когда нога в коленном суставе согнута на 90°, а звено от колена до таза
находится в горизонтальном положении. Конечное положение соответствует моменту,
когда человек находится в вертикальном положении. Такое движение характерно для
человека при поднятии тяжестей.
На вход каждого следящего
привода подавались напряжения, имеющие синусоидальный характер. Период
синусоиды соответствует вставанию экзоскелетона из полусидящего положения за
1.5с и приседанию за тот же период. Максимальные нагрузки, действующие на
гидроцилиндры, получены, исходя из величин крутящих моментов в каждом из
суставов (данные RRC). Исходя из кинематической схемы экзоскелетона, в которой
в качестве исполнительных гидродвигателей применяются гидроцилиндры, были
получены значения нагрузок, которые действуют на штоки гидроцилиндров.
Принимаем, что нагрузки,
действующие на гидроцилиндры, имеют постоянное значение. Значение величин нагрузок,
действующих на штоки гидроцилиндров,
приведены в таблице №3.
При вставании экзоскелетона
гидроцилиндры, принадлежащие противоположным сторонам экзоскелетона, движутся в
одной фазе с одинаковыми скоростями. Перемещения штоков гидроцилиндров
соответствуют максимальным значениям перемещений звеньев, полученные исходя из
кинематической схемы экзоскелетона.
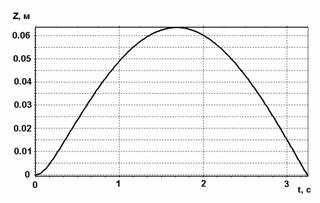
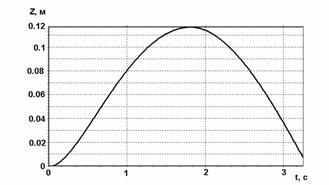
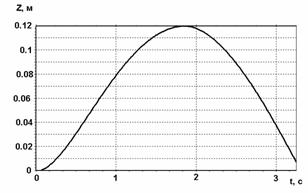
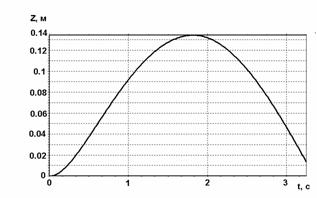
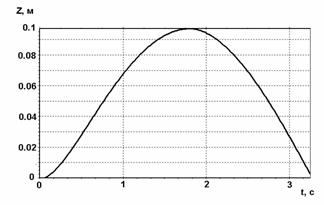
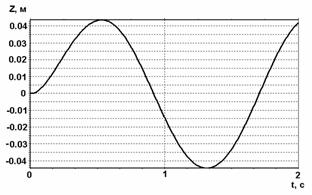
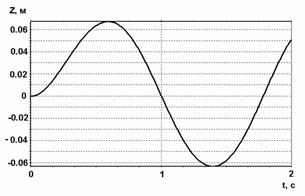
Из графиков перемещения
штоков гидроцилиндров бедра (рис.15), колена (рис.14), голени (рис.13), локтя
(рис.16), плеча (рис.17) видно, что штоки гидроцилиндров отслеживают входной
сигнал.
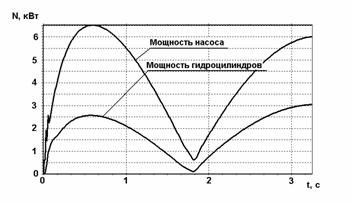
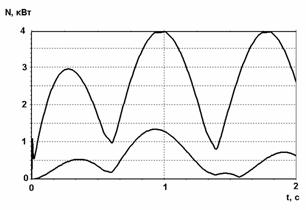
На рис.18 приведены графики
мощности насоса и полезной мощности, развиваемой гидроцилиндрами всех звеньев
экзоскелетона. Эти графики характеризуют энергетическую эффективность
гидропривода. Как видно из графика коэффициент полезного действия гидропривода
составляет в среднем 50% и выше, что для гидропривода с объёмно- дроссельным
регулированием является вполне удовлетворительным.
Второй режим движения
моделирует ходьбу человека. При движении одна нога находится в фазе опоры, эта
фаза характеризуется сравнительно высокими нагрузками и малыми скоростями,
вторая нога в фазе переноса, которая характеризуется сравнительно малыми
нагрузками и высокими скоростями.
Поскольку зависимости между
величинами перемещений штоков гидроцилиндров и нагрузок, приложенных к ним,
нет, то для моделирования был выбран синусоидальный закон изменения нагрузок с
амплитудой равной максимальной нагрузке.
Следует отметить, что нагрузки, действующие на штоки гидроцилиндры, а
также их скорости могут значительно отличаться при разных режимах работы
экзоскелетона.
Поскольку данных о
нагрузках, возникающих в суставах экзокелетона при ходьбе в настоящее время не
имеется, то в качестве нагрузочных характеристик были приняты синусоидальные
законы изменения. Нагрузка изменялась по
синусоиде с частотой 2 Гц для гидропривода ног и
частотой 1 Гц для гидропривода рук. Амплитуда нагрузок в степенях подвижности:
колено – 1000 Н, голень – 1200 Н, бедро – 1500 Н, плечо – 1000 Н, локоть –
1000Н. При этом как входной сигнал, так
и нагрузки, действующие на одноименные гидроцилиндры, принадлежащие
противоположным сторонам, изменяются в противофазе.
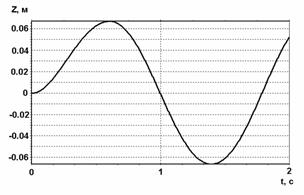
Гидропривод хорошо
отслеживает входные сигналы (рис. 20-22). Перемещения штоков гидроцилиндров,
принадлежащих противоположной стороне имеют тот же вид графиков, только с
противоположной фазой.
Энергетические
характеристики гидропривода можно оценить по графику мощностей насоса и
полезной мощности (рис.23). Коэффициент полезного действия в среднем равен 30
%. Было проведено математическое моделирование нескольких режимов с различными
значениями частоты и амплитуды.
Можно отметить, что для всех
режимов гидропривод хорошо отслеживает входной сигнал и имеет к.п.д. 30-40%,
что является хорошим значением для гидропривода с объёмно-дроссельным
регулированием.
Более точные результаты
можно получить, зная нагрузочные характеристики для каждого сустава
экзоскелетона.
По полученным результатам
моделирования гидропривода можно сделать следующие выводы. Насос, работающий
при постоянном давлении, поддерживает в системе постоянное давление. Поэтому
такой насос не может обеспечить высокие энергетические характеристики во всём
диапазоне изменения рабочих давлений гидроприводов экзоскелетона. Это видно из
энергетической характеристики, приведенной на рис.5. Если давление в
гидроцилиндрах близко к давлению настройки насоса, то потери в гидросистеме
будут минимальными, так как потери давления на ЭГУ будут меньше. Таким образом,
регулировка рабочего давления насоса в зависимости от режима движения
экзоскелетона может улучшить энергетические характеристики гидропривода.
Регулятор давления может
изменять рабочее давление насоса в диапазоне от 20 до 210 бар. Это
обеспечивается величиной предварительного поджатия пружины золотника
ограничителя давления. В течение работы экзоскелетона нет возможности
регулировать величину поджатия пружины золотника ограничителя давления насоса.
Однако существует модификация насоса с регулятором давления с дистанционным
управлением. Принципиальная гидравлическая схема такого насоса приведена на
рис. 4б.
Например, когда экзоскелетон
преодолевает значительные нагрузки и требуется высокое давление, то в
гидроцилиндрах регулятор давления должен быть настроен на высокое давление.
Примером могут служить результаты моделирования первого режима: когда
экзоскелетон встаёт из полусидящего положения с нагрузкой. Во время же ходьбы
при малой нагрузке, когда не требуется высокого давления в гидроцилиндрах,
регулятор может быть настроен на меньшее давление, и тем самым снизить потери давления
на сервоклапанах. Таким образом, изменяя давление настройки регулятора давления
насоса в зависимости от нагрузки и режима движения можно оптимизировать
энергетические характеристики. Сигналом для изменения настройки регулятора
давления насоса может служить сигнал с датчика нагрузки (тензодатчика), который
может быть установлен в каком либо звене экзоскелетона, например спине, тазе и
т.д. В зависимости от величины сигнала с этого датчика можно определить
нагрузки, которые будут действовать на гидроцилиндры и в зависимости от этого
установить рабочее давление насоса.
В целом предлагаемый
гидропривод обеспечивает работу экзоскелетона при различных режимах работы.
Список литературы
1.
Borovin G.K. Computer
Simulation of Hydraulic Control System of the Walking Machine. Proceedings 2nd
Tampere Intern. Conf. on Machine Automat, ICMA’98, p.p. 179-192.
2.
Боровин Г.К. Математическое моделирование гидравлической системы
управления шагающей машины: Препринт ИПМ РАН им. М.В.Келдыша №106, М., 1995г. 28с.
3.
Боровин Г.К., Костюк А.В. Математическое моделирование гидравлического
привода с LS-управлением шагающей машины: Препринт ИПМ РАН им.
М.В.Келдыша №54, М., 2001г. 28с.
4.
Боровин Г.К., Костюк А.В. Математическое моделирование гидросистемы
шагающей машины. // Материалы 11-ой Научно-технической конференции
«Экстремальная робототехника», С-Петербург: Изд-во СПбГТУ, 2001г. С.с. 96-106.
5. Боровин Г.К., Костюк А.В. Математическое моделирование гидравлической системы управления шагающей машины. // Труды научной школы-конференции «Мобильные роботы и мехатронные системы», Москва, МГУ, декабрь 2001г., 15с.
6.
Боровин Г.К., Костюк А.В. Математическое моделирование
гидравлической системы управления шагающей машины. // Теория и системы
управления. 2002г., №4.
7.
Боровин Г.К.,
Костюк А.В. Моделирование динамики гидропривода ноги шагающей машины: Препринт
ИПМ РАН им.М.В.Келдыша №8, М., 2002г. 28с.
8.
Боровин Г.К.,
Костюк А.В. Программный комплекс для моделирования динамики гидравлической
системы управления шагающей машины: Препринт ИПМ РАН им.М.В.Келдыша №
9.
Manessmann Rexroth,
Brueninghaus Hydromatik. “Product Catalogue Axial Piston Units”, Horb, Germany,
1997.
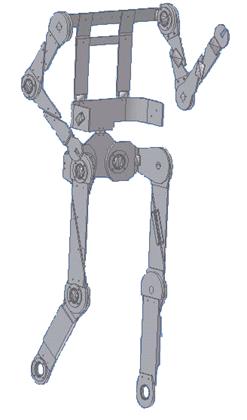
Рис.1.
Кинематическая схема экзоскелетона
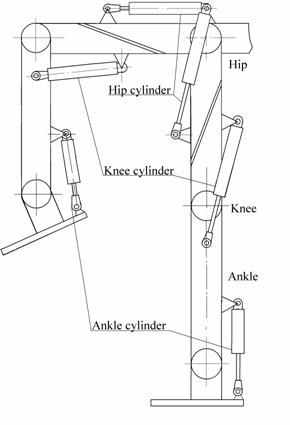
Рис.2. Принципиальная кинематическая схема с использованием гидроцилиндров
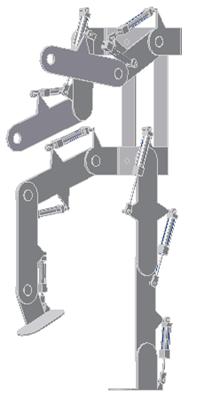
Рис. 2а. Кинематическая схема
экзоскелетона с использованием
гидроцилиндров
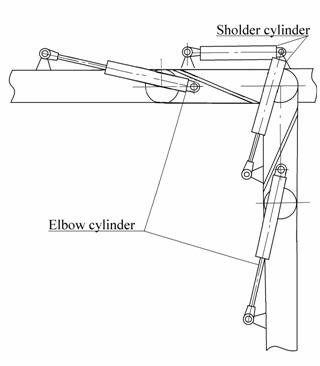
Рис.3.
Кинематическая схема плеча и руки с применением гидроцилиндров
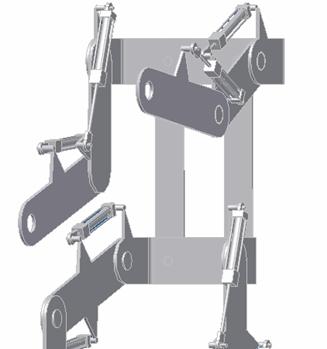
Рис.3а. Кинематическая
схема рук и плеч экзоскелетона с
использованием гидроцилиндров.
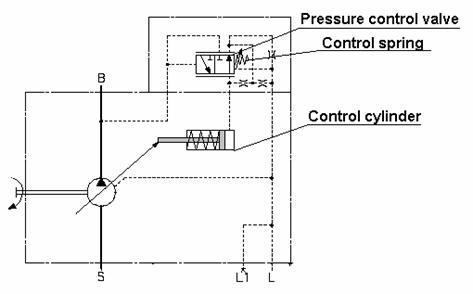
Рис. 4а. Принципиальная гидравлическая схема насоса с ограничителем
давления с дистанционным управлением.
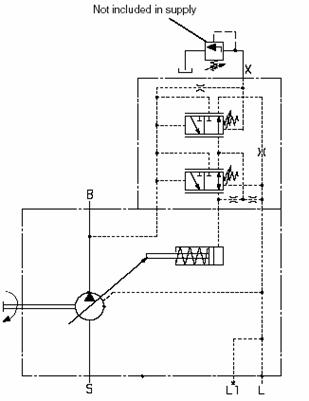
Рис. 4б. Принципиальная гидравлическая схема насоса с ограничителем
давления с дистанционным управлением.
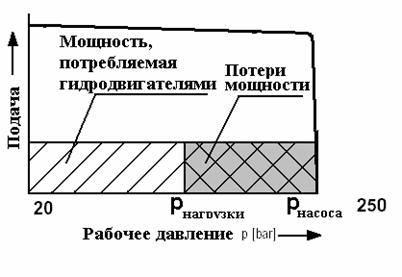
Рис.5а. Характеристика гидропривода с насосом, работающим на
постоянное давление.
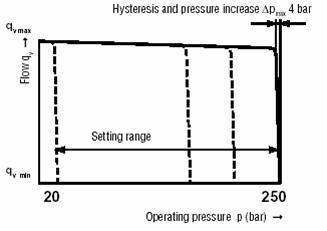
Рис. 5б.
Характеристика насоса, работающего на постоянное давление
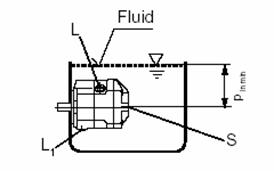
Рис. 6.
Схема расположения насоса внутри бака.
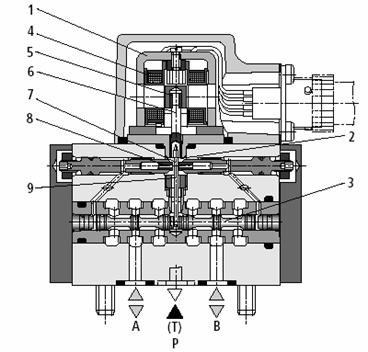
Рис. 7.
Электрогидравлический усилитель типа сопло-заслонка (servo valve)
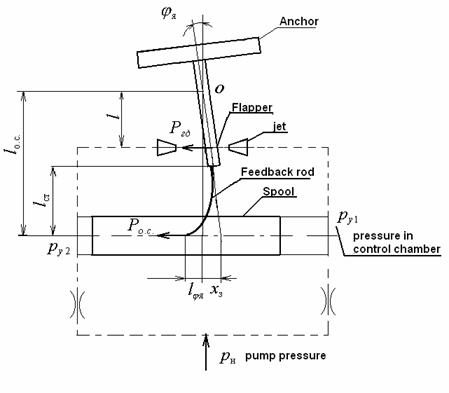
Рис. 8. Схема для расчёта электрогидравлического усилителя с силовой обратной связью от золотника к заслонке
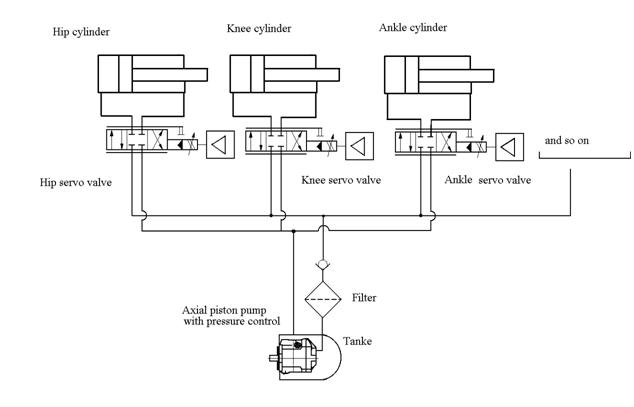
Рис.9.
Принципиальная гидравлическая схема экзоскелетона

Рис.10.
Структура системы управления гидродвигателя
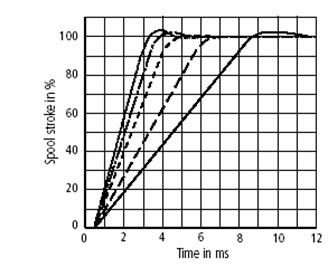
Рис.11.
Характеристика ЭГУ при ступенчатом воздействии.
|
Рис.12. График перемещения золотника Рис.13. Перемещение гидроцилиндра ЭГУ при ступенчатом воздействии голени при вставании и приседании
экзоскелетона |
|
Рис.14. Перемещение гидроцилиндра Рис.15. Перемещение гидроцилиндра колена при вставании и приседании бедра при вставании и приседании экзоскелетона экзоскелетона |
|
Рис.16. Перемещение гидроцилиндра Рис.17.Перемещение гидроцилиндра локтя при поднятии и опускании
рук плеча при поднятии и опускании
рук экзоскелетона
экзоскелетона |
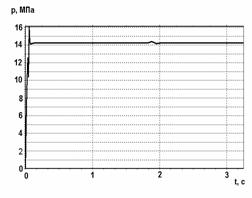
|
Рис.18. Графики мощности насоса и Рис.19 График давления полезной мощности всех жидкости, поступаемой гидроцилиндров
из насоса |
|
Рис.20. Перемещение гидроцилиндра Рис. 21. График перемещения бедра при ходьбе гидроцилиндра
голени при ходьбе |
|
Рис. 22. Перемещение гидроцилиндра Рис.23. Графики мощностей насоса колена при ходьбе и полезной
мощности
гидроцилиндров экзоскелетона |