СТЗ для навигации подвижного робота по маякам
на основе анализа конической проекции окружающего пространства на ТВ камеру
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
— — |
1. Введение.
2. Аппаратная часть СТЗ.
3. Алгоритмическое обеспечение СТЗ.
3.1. Системы координат.
3.2. Постановка задачи.
3.3. Основные этапы работы
алгоритма.
3.4. Интерфейс с оператором.
3.5. Нахождение образа маяков на изображении.
3.6. Определение направления и
расстояния до маяка.
3.7. Калибровка системы.
4. Эксперименты.
4.1. Описание полигона.
4.2. Угловое разрешение СТЗ.
4.3. Определение точности.
4.4. Определение зависимости
характеристик системы от направления.
4.5. Надежность определения
образа маяков в изменяющихся внешних условиях.
4.6. Влияние параметров юстировки конуса и камеры на
качество сигнала.
4.7. Оптические шумы и определение оптимальных
параметров бинаризации сигналов.
4.8. Тарировка геометрических параметров СТЗ.
4.9. Результаты.
5. Заключение.
6. Литература.
1.
Введение.
Проблема
достижения заданной позиции в пространстве играет важную роль в исследовании
возможностей мобильного робота. Существенную роль в решении данной задачи
играет зрительная информация. Большинство роботов смотрят только вперед,
исключая возможность получать информацию об остальном окружающем пространстве. Было проведено много исследований по
системам технического зрения (СТЗ) мобильных роботов с различными типами датчиков.
Некоторые из этих исследований упомянуты ниже [1-12].
Заманчивой
идеей является использование СТЗ с круговым обзором для управления движением
мобильных роботов. Одна из первых СТЗ кругового обзора была выполнена по
принципу рыбьего глаза [5]. Позже была предложена СТЗ из четырех камер, которые
смотрели в четырех направлениях [6]. В настоящее время получают широкое
распространение СТЗ кругового обзора, состоящие из монокулярной камеры и
конического отражателя [7–9]. Ниже рассматривается одна из таких СТЗ кругового
обзора для информационного обеспечения подвижного робота при целенаправленных
перемещениях в среде, снабженной специальными маяками.
Особенностью
описываемой СТЗ является использование конической проекции светового потока
окружающего СТЗ пространства на ТВ-камеру. С помощью конического зеркала
окружающая обстановка проецируется в объектив видеокамеры (Рис. 1). Такая СТЗ:
Ø обеспечивает осмотр
до 360°;
Ø использует, за
исключением конического зеркала, серийное оборудование;
Ø относительно
недорога.
Подобные
системы хорошо зарекомендовали себя для решения задач по информационному
обеспечению целенаправленных перемещений роботов в искусственной среде [9,10].
Алгоритмическое
обеспечение рассматриваемой СТЗ опишем на примере решения задачи обхода
подвижным роботом (ПР) нескольких маяков, одновременно горящих или поочередно
включаемых.
Рис. 1. Фотография СТЗ, установленной на роботе.
— —
2.
Аппаратная часть
СТЗ.
Аппаратную
часть СТЗ образуют (Рис. 1):
Ø ТВ-камера с 18°
объективом;
Ø блок питания
Ø 90° зеркальный конус,
закрепленный над ТВ-камерой;
Ø устройство ввода
видеосигнала в ЭВМ;
Ø ЭВМ с
соответствующим программным обеспечением.
Конус и камера
установлены сверху мобильного робота так, что плоскость основания конуса
горизонтальна и расположена ниже маяков на фиксированное расстояние. Камера
располагается строго на оси конуса на известном расстоянии от конуса. С целью
устранения бликов от осветительных приборов, над конусом установлена
горизонтальная пластина – отражатель, а объектив камеры закрыт блендой.
3.
Алгоритмическое
обеспечение СТЗ.
3.1.
Системы координат.
В расчетах
используются следующие системы координат:
1.
Абсолютная правая система координат OXYZ. Точка O расположена в центре
полигона на поверхности пола. Оси координат OX и OY расположены в
плоскости полигона и направлены вдоль его краев. Ось OZ ориентирована ортогонально
поверхности полигона. В этой системе заданы расстояния между маяками и высота
их подвеса.
2. Полярная система координат, связанная с основанием конуса O1Ra (Рис. 2). Точка O1
расположена на оси конуса в плоскости его основания. Угол a отсчитывается от
луча O1X против часовой
стрелки (вид сверху). Корпус робота, на котором испытывался КС, имеет форму
равностороннего треугольника. При установке КС на роботе ось конуса проходила
через центр этого треугольника. Одна из вершин была выделена в качестве
задающей направление корпуса робота. Ось O1X направлялась на эту вершину.
3. Правая прямоугольная система координат изображения O2X2Y2.
Точка O2 расположена в точке пересечения оси конуса и
плоскости изображения. Ось O2X2 –
направлена слева направо вдоль строк изображения, ось O2Y2
- снизу вверх вдоль столбцов изображения (Рис. 3).
4. Полярная система координат O2xy, связанная с изображением.
Ось O2x
совпадает с осью O2X2. Угол y отсчитывается от оси O2x
против часовой стрелки (Рис. 4).
— —
Рис. 2. Полярная система координат связанная с конусом O1Ra. R1, R2 - расстояния до маяков. a1, a2
углы на маяки
Система
координат OXYZ используется планировщиком движения для измерения
расстояний между маяками и высот их подвесов. Непосредственно для
навигации робота используется система координат O1Ra. В описываемом ниже
алгоритме поиска образов маяков на изображении используются системы координат O2X2Y2
и O2xy

Рис.
3. Системы координат связанные с изображением.
Прямоугольная O2X2Y2
и полярная O2xy
3.2.
Постановка задачи.
Полигон,
на котором опробовались обсуждаемые алгоритмы, представляет собой комнату с
ровным полом без посторонних предметов и маяками, подвешенными на высоте 1м от
пола.
Перед
роботом ставится одна из двух задач:
1. Посещение всех зажженных маяков и касание их
специальной выступающей частью.
2.
Проезд ворот, образованных двумя маяками.
3.3.
Основные этапы работы
алгоритма.
Для
навигации на полигоне робот использует полярную систему координат связанную с
конусом (Рис. 2). На основе анализа изображения получаемого с видеокамеры
определяются направления ai и расстояния Ri, до маяков. Эти данные
выдаются в систему управления движением робота.
— —
Решение задач обеспечения движения можно разбить на следующие этапы:
Нахождение образа маяка на
видеоизображении;
Определение направления и расстояния
до маяка;
Определение траектории движения.
Предполагается,
что управленческая и аппаратная части ПР реализует все необходимые перемещения
ПР по данным от СТЗ с требуемой точностью.
3.4.
Интерфейс с оператором.
В основу интерфейса с
оператором положена объектно-ориентированная библиотека графического интерфейса
пользователя для систем реального времени [12]. Работа с СТЗ организована в
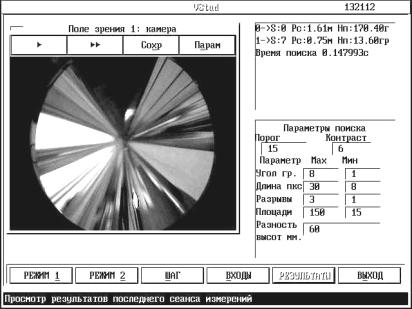
виде диалога оператора с системой (Рис. 4).
В окно, расположенное в
левой части экрана, выводится обрабатываемое изображение. В зависимости от типа
входа (файл, камера, видеоклип) над ним высвечиваются различные управляющие
кнопки. В самом верхнем правом углу выводится размер свободной памяти в
килобайтах. В правой верхней части экрана выводятся результаты работы
алгоритма. В правой средней части отображаются и вводятся параметры,
необходимые для настройки алгоритма. Вдоль нижней части экрана помещен ряд
управляющих кнопок. В самом низу расположена строка состояния, в которой
отображаются подсказки оператору и сообщения о текущем состоянии системы.
— —
Рис.
4. Основной экран при работе с СТЗ.
Описание окон и
кнопок графического интерфейса:
Ø
“Режим 1” – режим кругового осмотра. Маяки ищутся во всей видимой
области.
Ø
“Режим 2” – режим слежения за маяками
Ø
“Шаг” однократный поиск в режиме слежения
Ø
“Выходы” – выбор источника изображения: камера/файл/видеоклип
Ø
“Результаты” – не используется.
Ø
“Выход” – выход из программы
Ø
“Порог” – задание порогового значения яркости в алгоритме обнаружения
маяков на изображении или способа его
вычисления.
Ø
“Контраст” – задание контраста в алгоритме обнаружения маяков на
изображении.
Ø
“Угол” – задание интервала допустимых угловых размеров образа маяка в
градусах.
Ø
“Длина” – задание интервала допустимой протяженности по радиусу образа
маяка в пикселях.
Ø
“Разрывы” – задание параметров связанности.
Ø
“Площади” – задание интервала допустимой площади образа маяка в
пикселях.
Ø
“Разность высот” – задание высоты подвеса маяка над плоскостью
основания конуса в миллиметрах.
3.5.
— —
Нахождение образа маяков на
изображении.
— —
Рис. 5. Пример изображения окружающего пространства на объективе
ТВ-камеры после конического зеркала: а. - включен один маяк; б. - включено три
маяка.
Изображение,
получаемое в ЭВМ (Рис. 5) имеет прямоугольный формат: 250x250 точек, яркость
каждой проквантована на 64 уровня. С этим изображением связана прямоугольная
система координат изображения O2X2Y2
(Рис. 3). В системе построения движения робота используется полярная система
координат O1Ra (Рис. 2). Для
перехода из системы координат изображения O2X2Y2
в систему координат робота O1Ra используется промежуточная
система координат O2xψ, также связанная с изображением (Рис. 3).
Переход
из системы O2X2Y2 в полярную систему
изображения O2xψ осуществляется при помощи специальной таблицы –
так называемой LOOK-UP-TABLE, позволяющей быстро определить, декартовы
координаты точек, расположенных на окружностях с дискретным радиусом. Для
хранения этой таблицы был создан специальный файл, содержащий ссылки (x, y) Þ (x2, y2). В этом файле
последовательно записаны координаты точек, лежащих на окружностях с радиусами
от 3-х до 125 пикселей. В процессе работы программы файл загружается в память
для оперативного доступа.
Переход
из системы координат O2xy в O1Ra будет рассмотрен в п. 3.6
Образ
маяка идентифицируется как группа ярких точек, обладающих определенным
контрастом с фоном, имеющих расстояние до ближайшего соседа не больше заданной
величины. Угловой и радиальный размеры внешней границы этой группы точек не превосходят
заданный.
В целом, работа
алгоритма нахождения образов маяков на изображении заключается в
последовательном просмотре точек, расположенных на
— —
окружностях
с дискретными радиусами и отборе точек изображения, удовлетворяющих критериям
принадлежности образу маяка.
Сначала проводится
проверка точек на яркость и контраст. Точки, прошедшие отбор по этим критериям,
разбиваются на множества, в которых точки отстоят друг от друга не более чем на
заданный угловой размер. Полученные множества проверяются по ограничениям на
угловые, радиальные размеры, связности по радиусу и критерию по площади.
Множества,
прошедшие проверки, считаются образами маяков.
Режим
кругового осмотра. Алгоритм нахождения образов маяков на изображении имеет два основных
режима исполнения: круговой поиск и поиск в режиме слежения. Основное отличие
этих режимов состоит в объеме анализируемых зрительных данных и,
следовательно, в скорости получения ответа. В режиме кругового осмотра
перебираются и обрабатываются все точки изображения. Полное время кругового
осмотра составляет 0.120 сек. Из них 0.100 сек. занимает ввод изображения в
память ЭВМ (это время пропорционально площади вводимого изображения) и 0.020
сек. - алгоритм поиска образов маяков.
Режим слежения. В режиме слежения поиск
образов маяков проводится не во всем поле зрения, а только в окрестностях ранее
найденных образов маяков. На основе информации о ранее найденном образе маяка и
его расположении в поле зрения СТЗ, времени, прошедшем с момента предыдущего
ввода зрительных данных и известном законе движения ПР на этом отрезке,
определяются размеры области поиска в полярной системе координат изображения, в
котором должен находиться образ маяка.
В описываемой реализации алгоритма для упрощения
были приняты следующие фиксированные значения параметров, характеризующих
возможное перемещение образа маяка между двумя последовательными измерениями:
по углу 4º, по радиусу 5 пикселей. На основании этих ограничений и с
учетом прогноза изменения расстояния до прослеживаемого маяка вычисляется
прямоугольник в системе координат O2X2Y2, содержащий область поиска образа этого маяка. Так, на расстоянии 2м
размер прямоугольника равен 30x40 пикселей. Требуемый прямоугольник считывается из буфера устройства
ввода видеосигнала и анализируется уже в полярной системе координат
изображения.
Анализ проводится последовательно для всех известных
маяков. Алгоритм поиска образов маяков такой же, как и в режиме кругового
осмотра. Но в режиме слежения проводится анализ только дуг окружностей, попадающих
в область поиска.
Режим слежения позволяет существенно сократить время
поиска маяков и повысить устойчивость алгоритма обнаружения по отношению к
внешним возмущениям.
3.6.
Определение направления
и расстояния до маяка.
Определение
направлений и расстояний до маяков осуществляется на основе анализа
расположения образов маяков на изображении. Выходные данные формируются в
системе координат O1Ra.
Так
как образ маяка - это множество точек, то в качестве радиус-вектора (x, y) образа маяка
принимается центр тяжести этого множества.
— —
По
углу при вершине конуса, радиусу основания конуса a, расстоянию b
от вершины конуса до оптического центра объектива ТВ-камеры, высоте подвеса
маяков dH над плоскостью
основания конуса и x –
расстоянию от оси конуса до образа маяка вычисляется расстояние R
до маяка (Рис. 6).
В
рассматриваемой СТЗ используется конус с углом при вершине 90°, что существенно
упрощает связь между расстояниями до маяка R и до его образа x.
Рис. 6. Схема
определения расстояния до маяка.
R
– расстояние до маяка, х - расстояние от оси конуса до
изображения маяка, а – радиус основания конуса, b расстояние от вершины
конуса до точки фокусировки, r - радиус точки отражения (от оси
конуса), f – расстояние от оптического
центра объектива ТВ-камеры до плоскости изображения, dH – высота маяка над
плоскостью основания конуса.
Вычисления
проводятся по следующим формулам:

x определяется в пикселях, а
затем переводится в метрическую систему по формуле: xметр = β*xпикс. Параметр β
вычисляется исходя из известных размеров конуса в метрической системе и в
пикселях на изображении.
Диапазон расстояний, на которых может
функционировать рассматриваемая СТЗ, определяется границами поля зрения,
которые задаются геометрическими характеристиками СТЗ и расстоянием от
основания конуса до плоскости подвеса маяка (Рис. 7).
— —
Углы
a и y отсчитываются в
параллельных плоскостях. Поэтому при формировании выходных данных расчет угла y сводится к добавлению некоторой
константы к углу a.
Рис. 7. Поле зрения СТЗ.
3.7.
Калибровка системы.
Калибровка системы заключается в определении
реального расположения конического сенсора на подвижном роботе, а так же в
подборе параметров алгоритма поиска маяков для конкретных условий решения
задачи (очередной заезд робота). Образы маяков характеризуются радиальным и
угловым размерами, яркостью и контрастом. Последние две величины измеряются в
единицах АЦП устройства ввода ТВ-сигнала. При движении робота по прямолинейным
траекториям вводится дополнительный параметр - угол g(α) (Рис. 10) между
плоскостью подвеса маяков и вектором направления на маяк, расположенном в
плоскости основания конуса. Введение этого угла позволяет вносить поправку на
не параллельность плоскости подвеса маяков и плоскости основания конуса.
Значение g(α) подбирается линейной
интерполяцией нескольких контрольных измерений. Далее оно используется в
расчетах результатов других измерений. В случае движения робота по непрямолинейным
траекториям предполагается строгая параллельность плоскости основания конуса и
плоскости подвеса маяков. Результаты калибровки СТЗ на полигоне заносятся в
— —
таблицу.
В таблице 1 приведен пример такой калибровочной таблицы, заполненной для
условий экспериментов в лаборатории.
Таблица 1
Параметры алгоритма поиска маяков
|
Порог яркости (единицы АЦП). |
Контраст (единицы АЦП). |
Минимальный угловой
размер образа маяка (угловые градусы). |
Максимальный
угловой размер образа маяка (угловые градусы). |
Параметр связности
(пикселы) |
|
15 |
10 |
2 |
8 |
3 |
|
|
|
|
|
|
|
Максимальная протяженность
по радиусу (пикселы). |
Минимальная площадь
(пикселы). |
Максимальная площадь
(пикселы). |
Дополнительный –
поправочный угол (для измерений при движении по прямой) |
|
|
30 |
10 |
110 |
0,3 |
|
4.
Эксперименты.
Для
опробования описанной системы и предложенных алгоритмов сбора и обработки
зрительных данных были проведены эксперименты по информационному обеспечению
автономного робота, перемещающегося в условиях лабораторного полигона,
оборудованного несколькими маяками.
В
этих экспериментах основными задачами ставились:
Ø
определение и исследование характеристик данной системы по точности
расчета направления и дальности до маяков;
Ø
определение пределов
применимости системы по дальности;
Ø
исследование надежности работы в зависимости от различных внешних
воздействий.
4.1.
Описание полигона.
Экспериментальный полигон представлял
собой помещение лаборатории с размещенным в ней оборудованием. Для опытов
использовался описанная СТЗ, закрепленная на фиксированной высоте на подвижном
роботе, а так же два маяка, подвешенных на штативе и разнесенных на расстояние
2м. Каждый маяк представляет собой кольцо светодиодов инфракрасного диапазона и
лампу накаливания, объединенных в одном цилиндрическом корпусе (Рис. 8).
Расстояние dH от плоскости подвеса маяков до
плоскости основания конуса составляло 6см.
Рис.
8. Фото маяка использованного в экспериментах.
— —
4.2.
Угловое разрешение СТЗ.
Угловое разрешение δψ рассматриваемой СТЗ зависит от центра расположения
образа рассматриваемого объекта по радиусу, и зависит от числа точек,
образующих дискетную окружность этого радиуса (Рис. 9). Так, окружность радиуса
3 пикселя образуют 16 точек, что соответствует разрешению δψ=22,5°. Окружность радиуса 20 образуют 112 точек, и
разрешение соответствует δψ=3,2°. Для окружности максимального радиуса –125 пиксела,
из 704 пикселов угловое разрешение δψ составляет 0,51° на 1 пиксел.

Рис. 9. Изображение дискретной окружности радиуса 15
пикселов, δψ - угловое разрешение на 1 пиксел.
4.3.
— —
Определение точности.
— —
Точность определения направления на маяк. Так как при уменьшении расстояния до маяка
происходит увеличение расстояния от проекции оси конуса на изображении до
образа маяка (Рис. 5, 6), то при приближении к маяку угловое разрешение СТЗ
повышается и точность определения направления на маяк увеличивается.
Кроме того, достижимая точность определения
направления на маяк выше, чем угловое разрешение СТЗ. Это связано с тем, что
образ маяка представляет собой множество точек, и при вычислении направления на
маяк вычисляется центр тяжести этого множества. Точность определения координат
центра тяжести объекта на изображении обратно пропорциональна корню квадратному
характерных размеров объекта по координатным осям. Для образа маяка (эллипс
площадью от нескольких десятков до сотни пикселов) во всем диапазоне рассматриваемых
дальностей эта точность составляет доли пиксела. Наибольший интерес при
организации проезда в ворота представляет точность определения направления на
наименьшем расстоянии до маяка. Для условий вышеописанного полигона и
компоновки конической СТЗ она составила 0,25° на 1 пиксел на расстоянии 1,2 м.
Точность определения расстояния до маяка. Как видно из формул связь расстояния x образа маяка от оси конуса и расстояния до маяка R от оси конуса носит гиперболический характер (Рис.
6). Таким образом, подбирая параметры СТЗ можно варьировать диапазон расстояний
и точность измерений.
Если в условиях полигона яркость образа маяка не
имеет сильной зависимости от расстояния ПР до маяка, можно обеспечить высокую
точность измерения на малых расстояниях. Но при этом точность измерения на
больших расстояниях будет мала. Или наоборот, можно обеспечить приемлемую
точность в большом интервале расстояний. Но при этом точность определения
расстояния на малой дистанции будет хуже, чем в первом случае.
Для исследуемой СТЗ при δH равном 6 см.
изменение расстояния x до образа маяка с 20 до 21 пиксела соответствует
уменьшению расстояния R до маяка на 40 см (Рис. 6). Т.е. в первом
приближении (без учета размеров образа маяка) точность в определении дальности
до маяка составляет 40 см на пиксел. Так как образ маяка имеет большую протяженность
по радиусу, дисперсия при вычислении положения центра тяжести образа маяка
больше, чем при вычислении центра тяжести образа маяка по углу. С учетом
определения положения центра тяжести образа маяка в радиальном направлении с
точностью 0,5 пиксела точность разрешения по дальности повышается до 20 см. При
изменении x со 115 до 116 пикселов, что соответствует
расстоянию в 1,2 м, оценка первого приближения по точности определения
расстояния составляет 12 см. Это соответствует точности в 10%. Как упоминалось
выше, угловая точность на таком расстоянии выше 0,1% . В результате проведенных
экспериментов, при
Рис. 11. Угол h между плоскостью основания конуса и плоскостью матрицы
ТВ-камеры.
— —
дополнительной настройке СТЗ и перемещении маяков в
20° угловом диапазоне при расстоянии до маяка равном
1,2м, в статических экспериментах была достигнута точность измерений в 10 см.
Но для достижения такой точности при
перемещении маяков в большем угловом диапазоне, требуется более точная
настройка СТЗ с использованием вспомогательного оборудования.
4.4.
Определение зависимости характеристик системы от
направления.
Для конического отображения было выделено три
параметра, которые существенно влияли на положение образа маяка на
видеоизображении. Первый параметр – это расстояние dH
(Рис. 6), второй – угол g(α) (Рис. 10)- угол между плоскостью основания конуса и
плоскостью подвеса маяка в плоскости образованной осью конуса и вектором на
маяк. И третий параметр – угол h (Рис. 11)
-угол между плоскостью основания конуса и плоскостью матрицы ТВ-камеры.
Как видно из Рис. 10, при угле g(α) отличном от 0, возникает анизотропность dH
в пространстве, а, следовательно, возникает поправка ΔδΗ,
которая зависит от R и α.
4.5.
Надежность определения образа маяков в изменяющихся
внешних условиях.
Исследование свойств
СТЗ в изменяющихся внешних условиях проводилось по следующей методике:
Ø
Эксперименты проводились при разных условиях освещенности помещения
лаборатории (солнечный, пасмурный день; искусственное освещение включено/выключено);
Ø
Рассматривались маяки с включенной и выключенной лампой видимого
диапазона;
Ø
Записывались на видеокассету зрительные данные с камеры СТЗ во время
движения робота по полигону, на котором проводились соревнования всероссийского
студенческого фестиваля робототехники. На этих видеоматериалах исследовались
предлагаемые алгоритмы обработки зрительных данных.
Ø
Эксперименты проводились как с одним зажженным маяком,
так и с двумя. Маяки вывешивались на одинаковую высоту, после чего
производились измерения. Изображение вводилось в ЭВМ и анализировалось. В
качестве координат образа маяка на изображении сцены выбирался центр тяжести
точек изображения, относимых к образу маяка.
4.6.
Влияние параметров юстировки конуса и камеры на качество сигнала.
В результате
экспериментов было установлено, что угловое отклонение оси камеры относительно
оси конуса не влияет существенно на картину, отображаемую коническим зеркалом.
Например, только при отклонении больше 5º становится заметным отличие
изображения края конуса от окружности. Плоскопараллельные перемещения конуса
относительно камеры в пределах,
— —
допустимых
системой настройки сенсора, также не вызывают заметных искажений. Отсюда был
сделан вывод об отсутствии влияния описанных изменений при определении угла на
маяк в данной реализации сенсора.
Но, как показали
опыты, плоскопараллельные перемещения камеры относительно конуса параллельно
плоскости основания конуса играют существенную роль в определении как
расстояния до маяка, так и размеров области поля зрения СТЗ. Неправильная
установка конуса относительно камеры может привести к ошибке измерения
расстояния до 200% на расстоянии в 2м.
Корректность установки
конуса относительно камеры проверялась путем многократных измерений расстояния
до равноудаленных маяков при помощи сенсора с определением требуемого смещения
камеры и конуса (см. ниже).
4.7.
Оптические шумы и определение оптимальных параметров бинаризации сигналов.
В системе нахождения
образов маяков [1] использовался ряд настроечных параметров. Одни из самых
важных параметров это пороги яркости и контраста, используемые при оцифровке
входного видеосигнала. Их правильный выбор играет существенную роль в
формировании образа маяка на цифровом изображении. Порог яркости Iп
задавался в единицах АЦП с помощью следующего соотношения: Iп= Iмах
- Iв, где Iмах – максимальная яркость на изображении, а Iв
– вводимое число. В результате экспериментов было выявлено, что характерный
интервал порога яркости лежит в диапазоне [10,20] единиц АЦП. Значение 15
единиц АЦП обеспечивало стабильную работу практически во всех исследованных
условиях.
Выбор контраста, так
же играет существенную роль. Его значение оказывает влияние на результаты
работы алгоритма поиска образов маяков при работе со светофильтрами. Без
светофильтра образ маяка имеет большой контраст с темным фоном стен помещения.
В этих условиях оптимальным значением контраста было 8 единиц АЦП. Но при этом
на фоне окна образ маяк сливается со своим отражением. При использовании
светофильтра картина становится более размытой. Большой контраст образа маяка с
фоном теряется. Но в этих условиях маяк виден на фоне окна, так как изображение
окна тоже становится темнее. Поэтому при использовании светофильтра значение
контраста приходилось уменьшать.
4.8.
Тарировка геометрических параметров СТЗ.
Тарировка модели СТЗ
заключается в правильном измерении ряда параметров.
Необходимо правильно
определить расстояние b от оптического центра объектива
камеры до вершины конуса, размер конуса a (Рис. 6) и коэффициенты для
пересчета из абсолютных размеров в размеры в элементах цифрового изображения -
пикселях и обратно. Так же необходимо связать угловые координаты полярной
системы координат изображения и полярной системы координат конуса. Размеры
конического сенсора измерялись при помощи штангенциркуля.
Необходимо с
точностью 1 мм совместить ось конуса с оптической осью камеры. Для этого, с
помощью СТЗ, проводились многократные измерения расположения равноудаленных
маяков, расположенных симметрично
— —
относительно
оси конуса. При этом было необходимо добиться такого положения конуса, чтобы с
любого направления образы маяков, равноудаленных от оси конуса, были
равноудалены от образа оси конуса на изображении. После этого можно было
вычислить на изображении размер конуса N и приступить к вычислению значения
константы для связи угловых координат. Наиболее рациональным является привязка
начала отсчета на изображении к
вертикальной оси, а на конусе – к легко выделяемому направлению, например по
нормали к корпусу видеокамеры. Эта привязка является жесткой в силу того, что
камера неподвижна относительно корпуса сенсора. Помещая маяк в заданном
направлении, можно было вычислить требуемую величину константы С.
Если камера еще не зафиксирована на корпусе, то, поворачивая ее вокруг оптической оси,
можно свести эту константу к 0, после чего приклеить камеру к корпусу СТЗ.
4.9.
Результаты.
Эксперименты
проводились на полигоне при разности высот между плоскостью основания конуса и
плоскостью подвеса маяков dH = 6 см. СТЗ была отрегулирована на обеспечение наиболее
точных результатов в интервале [350,10] градусов и расстояний [1.5¸3]м. Ручные измерения
проводились при помощи рулетки. Угол рассчитывался триангуляционным методом.
Результаты проведенных экспериментов приведены в таблице 2.
Таблица 2.
|
Измеренное
расстояние [см] |
Измеренный угол
[град]. |
||||
|
ручной способ |
КС |
расхождение [см] |
ручной способ |
КС |
расхождение [град] |
|
360 |
347 |
13 |
359 |
358,8 |
0,2 |
|
360 |
347 |
13 |
358,6 |
358,7 |
0,1 |
|
361 |
376 |
15 |
358,7 |
357,6 |
0,1 |
|
370 |
366 |
4 |
351,5 |
351,3 |
0,2 |
|
370 |
347 |
23 |
6,9 |
6,7 |
0,2 |
|
370 |
356 |
14 |
9,8 |
9,7 |
0,1 |
|
376 |
330 |
46 |
17,0 |
17,2 |
0,2 |
|
405 |
336 |
69 |
24,2 |
24,0 |
0,2 |
|
183 |
185 |
2 |
359 |
359,2 |
0,2 |
|
180 |
185 |
5 |
359,5 |
359,4 |
0,1 |
|
181 |
192 |
11 |
0,3 |
0,2 |
0,1 |
|
180 |
182 |
2 |
8,1 |
8,3 |
0,2 |
|
178 |
173 |
5 |
18,9 |
18,8 |
0,1 |
|
190 |
198 |
8 |
30,5 |
30,7 |
0,2 |
|
180 |
173 |
7 |
55,7 |
55,6 |
0,1 |
|
180 |
160 |
20 |
71 |
71,2 |
0,2 |
Результаты экспериментов
5.
— —
Заключение.
— —
В проведенных экспериментах описанная СТЗ
показала свою успешную применимость в качестве устройства для кругового пеленга
направления на маяки. При некоторых дополнительных усилиях она может
использоваться для определения расстояния до маяков. В рассмотренной СТЗ важную
роль играет параллельность плоскости основания конуса и плоскости полигона.
Так, например, если характерное расстояние от робота до маяка 6 м и разность
высот между плоскостью конуса и высотой подвеса маяка 20 см, то не
параллельность плоскости основания конуса и плоскости полигона в 1,5° приводит
к погрешности измерения расстояния порядка 50%. К этому следует добавить, что
— —
при
фиксированном угле расхождения плоскости основания конуса и плоскости полигона,
величина разности высот подвеса маяков и плоскости конического зеркала dH, используемая в
расчетах, зависит от угла на маяк и расстояния до него (Рис. 6).
При определении направления на маяк
расположенный на расстоянии 1.5м точность составила 0.5º, на расстоянии в
3м. – 1,5º.
6.
Литература.
1.
Waxman A.M., LeMoigne J.J., and Scinvasan B., A visual navigation system for autonomous
land vehicles. IEEE J. Robotics and Automation 1987. 3(2): p. 124-141.
2.
Соколов С.М.
Определение ориентира и его смещений в поле зрения фотометрической системы.
Препринт №97 за 1980г.
3. Turk,
M. et al. VIST-A vision system for
autonomous vehicles navigation. IEEE Trans. PAMI-10(3), 1988. p. 342-360.
4. Thrope
C., et al., Vision and navigation for the
Carnegie-Mellon Navilab. IEEE Trans. PAMI-10(3), 1988. p. 362-373.
5. Yachida
M., Ichinose T., and Tsuji S.. Model-guided
monitoring of a building environment by a mobile robot. In 8th
IJCAI 1983.
6. Ishiguron
H., Tsuji S. Applying panoramic sensing to autonomous map making a mobile robot.
In Proc, 93 International Conference on Advanced Robotics, Nov.
1993. p. 127-132.
7. Zuoliang
L. Cao Sung J. Oh, Ernest L. Hall. Omnidirectional dynamic vision positioning
for mobile robot. Optical engineering, Dec. 1986. Vol. 25 №12.
8. Yagi
Y., Kawato S., Panorama scene analysis
with conic projection. IEEE International workshop on intelligent Robots
& Systems. IROS’90
9. Yagi
Y., Kawato S. and Tsuji S., Real-time
omnidirectional image sensor (COPIS) for vision—guided navigation. IEEE
Trans. On Robotics & Automation Vol. 10, № 1, 1994.
10. Pegard
C., Mouaddib E.M., A mobile robot using
panoramic view. IEEE International Conference on Robotics & Automation,
Minneapolis, Minnesota, p. 89-94.
11. Yamazawa
K.,. Yagi Y, and Yachida M.. Obstacle
detection with omniderectional image sensor hyperoomni vision. In Int.
Conf. Robotics and Automation 1995 IEEE.
12. Yagi
Y., Sato K., Yachida M.. Evaluating
effectively of map generation by tracking vertical edges in omnidirectional
image sequence. in Int. Conf. Robotics and Automation 1995 IEEE.
13. Богуславский А.А, Соколов
С.М. Графический интерфейс систем технического зрения на базе персональных
компьютеров. Препринт №24 за 1998г.