КОМПЬЮТЕРНОЕ МОДЕЛИРОВАНИЕ В ЗАДАЧАХ
КОНВЕРТИРОВАНИЯ ЭЛЕКТРОМАГНИТНОЙ И КИНЕТИЧЕСКОЙ ЭНЕРГИИ. РЕШЕНИЕ ЗАДАЧ. © М.П.
Галанин ИПМ им. М.В. Келдыша РАН THE COMPUTER SIMULATION IN
THE PROBLEMS OF ELECTROMAGNETIC AND KINETIC ENERGY TRANSFORMATION. THE SOLVING
OF THE PROBLEMS. M.P. Galanin Keldysh Institute of Applied Mathematics, Russian Academy of Sciences 1. Введение. В данной работе продолжается начатое в [1] представление систем математического моделирования явлений электромагнитного разгона и торможения проводящих макротел. Такие проблемы возникают при рассмотрении задачи преобразования электромагнитной и кинетической энергии. В [1] описана постановка задачи и представлены основные результаты, полученные за последние 20 лет активного исследования. Там же изложена математическая модель для описания электромагнитных полей в канале электродинамического ускорителя на основе квазистационарного приближения системы уравнений Максвелла. Приведены некоторые результаты двумерного описания разгона проводящих макротел в рельсотроне, соответствующие продольному сечению канала рельсотрона. В данной работе ниже в разд. 2 описана математическая модель магнитного компрессора и показаны получаемые с ее помощью результаты численного моделирования. Моделирование осуществляется в пространственно двумерном приближении в поперечном сечении ускорителя. В разд. 3 представлены различные способы пространственно трехмерного описания полей в канале рельсотрона. Проведено сравнение результатов применения модели [2] с данными [3, 4] на примере численного решения одной задачи. Сравнение свидетельствует о значительном преимуществе модели [2]. Далее описаны некоторые результаты моделирования рельсотрона с обращенным токоподводом, показавшие богатую картину распределения токов и полей. 2. Численное
моделирование электродинамического ускорения плоских пластин в лабораторном
магнитокумулятивном генераторе. 1. Модель движения пластинчатого лайнера в
электромагнитном компрессоре. На рис. 2.1 приведена
схема электромагнитного ускорителя проводящего лайнера. Показана одна
четверть сечения узла ускорения при z = const. Сечение узла ускорения при y = const приведено на рис. 2.2.
Показано присоединение соответствующих электрических цепей индуктора и
лайнера, которые могут коммутировать между собой. Здесь и далее лайнер,
индуктор и относящиеся к ним элементы и величины помечены соответствующими
индексами A и B.
Рис. 2.1. Схема четверти сечения области, в которой решается задача,
плоскостью z = const.
Рис. 2.2.
Схема сечения пространственной области, в которой решается задача (в рамке),
плоскостью y = const и электротехнические цепи устройства. Требуется по начальным и
граничным данным, физическим характеристикам сред рассчитать их положение и
скорость, напряженность и давление магнитных полей в зазорах между пластинами
ускорителя, профиль их поверхностей, токи и напряжения во внешних
электрических цепях. Для моделирования
процессов, протекающих в электродинамическом ускорителе подобного вида в
процессе работы, использована следующая модель. Задача рассматривается в
пространственно двумерном приближении. Все величины считаются зависящими
только от координат x и y. Это формально означает бесконечную протяженность
ускорительной системы в направлении z. При этом в модели должна учитываться
«эффективная» длина системы в z – направлении, в значительной степени определяющая
перекачку энергии из внешней электрической цепи в кинетическую энергию лайнера. Параметры внешних
электрических цепей предполагаются сосредоточенными, так что для описания
цепей можно применять уравнения Кирхгоффа [3, 5, 6]. Уравнения внешних цепей
должны быть выбраны в форме, которая бы обеспечивала выполнение закона сохранения
энергии в системе. Кроме того, математическая модель должна обеспечивать
протекание полного тока цепи через заданные сечения. Индуктор предполагается
неподвижным. Материал индуктора является проводником. Положение проводящего
лайнера подлежит расчету в зависимости от динамики протекающих процессов.
Предварительный анализ [7] явлений, протекающих при ускорении, показывает,
что материал лайнера подвергается магнитному давлению порядка или
превышающему его предел текучести. Характерные скорости примерно в 5 раз ниже
скорости распространения акустических колебаний в лайнере. Надежная
информация об уравнении состояния вещества лайнера в указанных условиях в
литературе отсутствует. Поэтому в качестве первого приближения выбрана модель
вязкой электропроводной несжимаемой жидкости. Очевидно, что такое
представление не может описать любой режим движения лайнера. Выяснение пределов
применимости данной модели путем сравнения даваемых ею результатов с данными
экспериментов представляет собой отдельную проблему. Решение задачи должно
удовлетворять заданным начальным и граничным условиям, а также обеспечить
протекание заданного тока по каждому из (вообще говоря, N) проводников. Видно, что с точки зрения
электродинамики данная задача полностью соответствует вспомогательной задаче
определения решения на торцах ускорителя, описанной в [1, разд. 2, п. 2]. В
результате здесь также приходится решать систему интегро – дифференциальных
уравнений с частными производными (2.4) из [1]. Параметры внешних
электрических цепей предполагаются сосредоточенными, так что для описания
цепей можно применять уравнения Кирхгоффа [3, 5, 6]. Они являются следствием
интегрирования уравнения системы по плоскости и контуру данных цепей. Однако
отсутствие поперечной компоненты электрического поля в модели создает
дополнительную сложность в записи уравнений цепи. При этом речь идет о
слагаемом, обеспечивающем связь процессов во внешних электрических цепях с
процессами внутри ускорителя. Ее отсутствие обесценит модель, т.к. в этом
случае модель заведомо не будет описывать процесс перекачки энергии из кинетической
энергии лайнера в энергию цепи. Поэтому поступим следующим
образом. Анализ энергетических соотношений в электрических цепях [3, 6]
показывает, что соответствующий член является сомножителем в произведении на
силу тока в цепи, описывающем обмен электромагнитной энергией между цепью и
ускорителем. Очевидно, что искомое слагаемое в уравнениях цепи при вычислении
баланса энергии должно давать эту же величину с противоположным знаком. Для описания движения
элементов сплошной среды в соответствии с принятой физической моделью будем
использовать систему уравнений Навье – Стокса [8 - 11]. Согласно сделанным
предположениям, в данной системе границы лайнера являются свободными. Это
дает условие равенства нулю нормальной и смешанной компонент вязкого тензора
давлений на его границах [9, с. 398; 28]. 2. Вычислительный алгоритм для расчета
движения пластинчатого лайнера в электромагнитном компрессоре. Для численного решения
поставленной задачи будем использовать метод конечных элементов (МКЭ) [12 -
14] на треугольных сетках. Будем вести описание
процессов на сетке, точки которой двигаются вместе с веществом в лайнере и
являются неподвижными в индукторе. Вне проводников нет движущейся среды, но
есть электромагнитное поле, которое необходимо описывать. Будем делать это на
подвижной сетке, которая перестраивается по некоторому алгоритму. Связи точек
сетки являются неизменными во времени, т.е. сетка является структурированной. Алгоритм перестройки
сетки состоит в линейном (или билинейном) растяжении соответствующих
подобластей межэлектродного пространства (см. рис. 2.1) по данным о начальных
(лагранжевых) координатах точек сетки. При этом происходит линейное
отображение в соответствии с координатами точек, рассчитываемыми из уравнений
движения. Систему ОДУ для амплитуд
конечных элементов получим в соответствии с алгоритмом Галеркина [12 – 14].
Его реализация в данном случае аналогична использованной в [3]. Аппроксимация уравнений
электродинамики производилась описанным выше способом. При этом одновременно
аппроксимировались уравнения внешних электрических цепей, так что явления внутри
ускорителя и в цепях описывались одновременно. Учет уравнений цепи привел к
необходимости численного решения системы интегро – дифференциальных
уравнений. Особенностью такой задачи
является плохая обусловленность соответствующей системы линейных алгебраических
уравнений (СЛАУ) из–за наличия интегральных членов. Их присутствие ведет к
потере единственности решения задачи в отсутствии диффузионных слагаемых.
Оказалось, что расчет полученной СЛАУ сильно зависит от используемого временного
шага (τ). Малое значение τ ведет к появлению больших ошибок
численного решения. При этом возникают паразитные осцилляции, появляются
выбросы тока, скачки силы и т.п. Наиболее просто наличие ошибок можно
наблюдать на величине полного тока, протекающего через индуктор. Несмотря на
математическую модель, обеспечивающую протекание заданного (из уравнений
внешних цепей) полного тока и в конечномерном случае, в ряде тестовых
вариантов происходило резкое падение точности передачи полного протекающего
тока через индуктор. Появление малых временных шагов, изменение характера
протекающего тока (знака его производных) или другие причины, ведущие к
уменьшению "веса" вторых производных, приводят к резким колебаниям
решения и расходимости итераций. Анализ модели показывает, что в отсутствие
пространственных производных решение задачи является неединственным:
добавление к решению в подобластях проводников любой функции, равной нулю в
начальный момент времени и дающей нулевой интеграл по подобласти проводника,
никак не меняет уравнение. Тем самым уменьшение временного шага, ведущее к
"увеличению" удельного веса временной производной, ухудшает
обусловленность СЛАУ. Тот же эффект достигается при увеличении
электропроводности. Обратные изменения, равно как и уменьшение пространственных
шагов, улучшают характеристики конечномерной задачи. В то же время шаг τ
не может быть выбран произвольным образом, т.к. он должен обеспечить
разрешение во времени всех протекающих в системе процессов. Подобные нефизические
колебания удалось устранить путем задания нулевого электрического тока в
центральной части индуктора. В этой области ток пренебрежимо мал и в точной
ситуации, так что подобная модификация не сказывается на решении. По этим причинам для
численного решения была выбрана полностью неявная разностная схема. Для
обращения СЛАУ использован прямой метод вида [15] с предобуславливателем.
Матрица для СЛАУ хранилась в т.н. "йельском" формате. Типичное число
неизвестных, которые находились при расчете электродинамической части задачи
(решение уравнений Максвелла), составляло 5 – 10 тысяч. При расчете кинематической
части задачи (решение уравнений Навье – Стокса) разыскивалось 2 – 5 тысяч неизвестных. Дополнительной мерой,
использованной для получения качественного решения задачи, служил внутренний
итерационный процесс при использовании прямого метода решения СЛАУ. Он описан
в [16] и представляет собой перерасчет решения СЛАУ с учетом полученной
невязки системы на предыдущей итерации. При этом одновременно
аппроксимировались уравнения Навье – Стокса и уравнения, описывающие
координаты точек сетки в лайнере. Учет подвижности точек лайнера ведет к
существенной нелинейности данной части полной задачи, в отличие от
электродинамической. Поэтому для нахождения решения данной части полной
задачи (при заданных силах Лоренца) использовался свой внутренний
итерационный процесс. Первоначально задача
решалась в т.н. "естественных" переменных [10] "давление –
скорость". Такой алгоритм представляется наиболее подходящим в данной
задаче из - за граничных условий. Однако в этих переменных нет явного
уравнения для давления. Его можно получить (см., например, [10, 17])
разнообразными способами из уравнения движения, используя условие
несжимаемости. При этом получается связанная система уравнений, в которой по
давлению вычисляются скорости, далее - координаты, потом – давление по
скоростям и координатам. В полученной системе уравнений оказалось очень
сложным выдержать условие несжимаемости (div v = 0) полученного итерационным образом решения. Сравнительно
небольшое (по меркам искажения общей
площади лайнера) нарушение этого условия мгновенно приводит к расходимости
итерационного процесса. В результате решение задачи получить не удалось. Намного более устойчивым
является алгоритм расчета решения уравнений Навье – Стокса в переменных
"вихрь – функция тока" [10]. Проблем со сходимостью при этом не
наблюдалось. Однако здесь возникают проблемы с учетом условий свободной
границы. Записать уравнения на свободной границе в терминах переменных
"вихрь – функция тока" возможно (подобно [18]), но эти условия
становятся весьма сложными и трудны для численной реализации. Полученные
численные результаты в переменных "вихрь – функция тока" для
условий, стандартно используемых для описания свободных границ во многих
задачах математической физики, оказались совершенно непригодными: лайнер
может лететь вверх при отрицательной суммарной силе. В данной работе (см.
также [19, 20]) использован алгоритм численного решения уравнений Навье –
Стокса в естественных переменных (p, v)
без проведения итераций между уравнениями для скорости и условием
несжимаемости, служащим уравнением для давления. При этом не проводится ни
расщепления по времени, ни разнесения переменных в уравнениях к разным
временным слоям. Получаемая матрица
системы не является симметричной. В результате для ее обращения выбран прямой
метод решения типа [15] с предварительной перестановкой строк и столбцов
матрицы. Это в особенности важно из–за того, что искомый вектор неизвестных
включает в себя обе компоненты вектора скорости, заданной во всех точках
сетки, а также давления, которые задаются на треугольниках. Это означает, что
искомая скорость (для обеих компонент) представляет собой линейную
интерполяцию значений сеточной скорости в вершинах треугольников, а искомое
давление является кусочно – постоянным по сетке. Областью постоянства
является треугольник сетки. Число треугольников примерно в два раза превышает
число их вершин. Таким образом, формат данных (их нумерация) является
фактически независимым, что резко ухудшает структуру обращаемой матрицы.
Выбранный прямой метод позволил найти решения СЛАУ. Отсутствие давления в
уравнении несжимаемости означает наличие нулевых диагональных элементов в
полученной СЛАУ. Большинство используемых методов решения СЛАУ не могут
решить такие системы. Это препятствие устраняется простым преобразованием
системы алгебраических уравнений: из уравнений для скорости выражается
соответствующая скорость и подставляется в уравнение несжимаемости. Для
каждого треугольника эта процедура выполняется 6 раз (по числу углов и компонент
скорости). В результате в уравнении появляются ненулевые диагональные
элементы, что позволяет найти решение задачи. Для уточнения решения так же,
как и в электродинамической части, использовался дополнительный внутренний
итерационный процесс вида [16]. Явления в канале
ускорителя протекают
самосогласованно. Построенная математическая модель позволяет передать эту
самосогласованность и описывать процессы в системе полностью. Единственным
достаточно грубым допущением модели является ее пространственная двумерность,
сказывающаяся в отсутствии ряда компонент полей и скоростей, наличии
"эффективной" длины ускорителя, виде и способе получения уравнений
внешних цепей. Для численного решения даже конечномерного аналога такой
системы уравнений необходим итерационный процесс. Для этого вся полная
система уравнений разбита на три группы: электродинамика, кинематика и тепло
с очевидными участниками данных групп. 3. Примеры численного моделирования движения
пластинчатого лайнера. Представленные ниже
результаты расчетов носят качественный характер (в том числе в силу
отсутствия в настоящий момент экспериментальных данных). Их назначение – отработка
модели и вычислительного алгоритма. Поэтому все данные приводятся в
безразмерном виде. Ниже представлены
результаты расчетов нескольких вариантов задачи. Приведена графическая
информация о решении, позволяющая судить о его качественных и количественных
характеристиках. Ряд других данных о проведенных расчетах представлен в [19,
20]. Рассмотрим вариант
расчета, в котoром ширины лайнера и индуктора одинаковы. К концу расчета форма
существенно искажается, что хорошо заметно на рис. 2.3. Правый угол лайнера
опережает центр, при этом правая половина расплющивается. На рис. 2.3
показана расчетная сетка в области лайнера, демонстрирующая его форму. Видно
очень существенное искажение исходной прямоугольной формы лайнера. Такое
искажение сопровождается переносом вещества лайнера вместе с проникшим туда
магнитным полем. Линии уровня компоненты Hy показывают наличие зон
повышенной напряженности внутри лайнера. Отметим искажение
геометрических масштабов лайнера, проведенное для его графического
представления. Истинные размеры лайнера по осям абсцисс и ординат отличаются
примерно в 50 раз. В следующем варианте
половина ширины лайнера на 0.1 меньше полуширины индуктора и равна 0.9. Цель
данного расчета – исследование поведения лайнера с измененной геометрией. В
конце расчета искажение начального прямоугольника по высоте составило более,
чем две начальные высоты, а по ширине – почти половину начальной ширины. Правый
угол лайнера опережает центр в наибольшей степени из просчитанных вариантов,
при этом торцевая поверхность лайнера вогнута внутрь.
Рис.
2.3. Вариант равной ширины лайнера и индуктора. Конечноэлементная сетка в
области лайнера в момент времени t = 0.1085. В третьем варианте
половина ширины лайнера на 0.1 больше полуширины индуктора и равна 1.1. Цель
данного расчета – исследование поведения лайнера с измененной геометрией в
сопоставлении, в частности, с предыдущими вариантами. В последний момент
времени искажение начального прямоугольника по высоте составило примерно начальную
высоту, а по ширине – четверть начальной ширины. Наибольшее отличие данного
варианта от всех ранее просчитанных состоит в ином направлении искажения
лайнера во время полета. Правый угол лайнера в данном случае отстает от
центра. Такое поведение не наблюдалось ни в одном из вариантов, в которых
ширина лайнера была равна или меньше ширины индуктора. Изменение характера
искривления лайнера указывает, что в некотором промежуточном варианте лайнер
будет лететь практически параллельно оси абсцисс. Приведенные на рис. 2.4
изолинии распределений x – ой компоненты плотности силы Лоренца в лайнере на
один из конечных моментов времени демонстрируют выпрямление нижней границы
лайнера при его приближении к оси абсцисс за счет генерации токов с большой
плотностью в левом нижнем углу и появления соответствующей тормозящей силы.
Хорошо видно действие ускоряющей силы Лоренца в основном напротив индуктора
(по его теневому отпечатку на лайнере). В результате правая часть лайнера
отстает от центра. На нее действует и тормозящая сила, приложенная к нижней
стороне лайнера.
Рис. 2.4. Вариант расчета с шириной лайнера, большей ширины
индуктора. Линии уровня компоненты силы Лоренца Flx в лайнере в
момент времени t = 0.1551. На рис. 2.5 представлены
графики сосредоточенной информации о расчете, характеризующие процесс в
целом. Это, соответственно (слева направо и сверху вниз), зависимости от
времени полной ускоряющей лайнер силы, тока в цепи лайнера, координаты центра
масс лайнера, скорости центра масс лайнера, напряжение на обкладках
конденсатора и полный ток в цепи
индуктора. Их амплитудные значения приведены ниже на графиках сосредоточенной
информации.
Рис. 2.5.
Графики сосредоточенной информации. Последний рис. 2.6
демонстрируют динамику энергии в системе для типичного расчетного варианта.
Хорошо видно, что уменьшение кинетической энергии системы ведет к увеличению
энергии тока (в катушек индуктивности) и энергии на обкладках конденсатора. В
то же время энергии магнитного поля явно недостаточно для полного торможения
лайнера, вследствие чего останов не происходит. 3. Пространственно трехмерные модели.
Примеры расчетов электромагнитного ускорения проводящих макротел. Обсудим моделирование
квазистационарных электромагнитных и тепловых полей, а также кинематических
величин в областях с резко неоднородными электрофизическими свойствами в
случае, когда часть проводников может двигаться под действием силы Лоренца.
Типичным представителем таких устройств является электромагнитный ускоритель
типа рельсотрон.
Рис. 2.6.
Энергия на обкладках конденсаторов в цепях, энергия магнитного поля, энергия
на индуктивностях в цепях, кинетическая энергия лайнера. Отметим, что существует
значительное число работ, посвященных моделированию процессов, протекающих в
электродинамических ускорителях. Часть из них указана выше. В последнее время
появились работы [28, 29], посвященные описанию вычислительных алгоритмов и
результатов их применения для решения трехмерных задач. В значительной степени
они следуют [30]. Далее появился пакет MEGA для расчета электродинамических
процессов путем решения системы уравнений Максвелла [31], давший толчок
работам с его применением [28]. Данный пакет основан на методе конечных
элементов. Однако указанные работы (а также [29]) посвящены в основном
методическим аспектам применения различных пакетов программ, а не полученным
с их помощью физическим результатам. Разработанное авторами
[3] программное обеспечение отличается от описанного в [28 – 31] главным
образом использованием практически однородного описания полей по подобластям
с разным типом электропроводности. В работах [28 –31] в подобласти
диэлектрика поля рассчитываются через скалярный магнитный потенциал, а в
проводнике - через векторный. В работах [2, 3] поля всюду рассчитываются
через векторный магнитный потенциал. Другие отличия состоят в различных
способах калибровки векторного потенциала, выборе способа дискретного
описания процессов и численного моделирования. Приведем примеры современных
работ, использующих пространственно трехмерное приближение для моделирования
рельсотронов. Наиболее популярным пакетом программ для трехмерного численного моделирования остается пакет MEGA. Он применяется, по – видимому, более, чем в половине работ, использующих трехмерное описание. В работах [32, 33] пакет MEGA использован для совместного моделирования электродинамики и термоупругости, для описания последней использован пакет DYNA3D. Тот же пакет использован в [34] для моделирования явлений в электродинамическом ускорителе с обратным токоподводом. Работа [35] посвящена численному моделированию рельсотронов с целью выделения чисто трехмерных эффектов, связанных с формой и геометрией ствола, проявляющихся прежде всего в погонной индуктивности ускорителя. В то же время очевидно, что и в широко используемом пакете MEGA имеются не до конца решенные вопросы. Так, в работе [36] исследуется, насколько хорошо в процессе решения системы уравнений Максвелла передается полный ток, протекающий через входное сечение рельсотрона. Очевидно, что неточное соответствие втекающего и вытекающего токов связано со способом задания граничных условий, отличным от описанного в [1, разд. 2, п. 2]. В данном разделе приведены примеры из [2] решения ряда пространственно трехмерных задач, иллюстрирующих некоторые возможности математического моделирования в данной области. 1. Задача
определения погонной индуктивности В [2, 3] разработана
математическая модель и метод численного моделирования процессов, протекающих
при электродинамическом ускорении, в самосогласованном и замкнутом виде. Для
этого рассмотрена задача о моделировании процесса движения проводящего якоря,
электромагнитных и тепловых явлений в рельсотроне и процессов во внешней цепи
в следующей постановке. С целью сокращения вычислений не рассматриваются
протекающие процессы в той части исходной области, в которой изменения полей
по сравнению с нулевым фоном малы. Поэтому рассмотрена задача в области G переменного (во времени) размера. По
x (и z в трехмерном случае) размеры области постоянны, а по y область G простирается от нуля до некоторого
зафиксированного размера, находящегося за торцом якоря. На границе впереди якоря
в [3] считаются заданными тангенциальные компоненты H, равные нулю,
предполагая, что магнитное поле не проникает в пространство впереди якоря.
Такое условие представляется достаточно точным в случае, когда толщина якоря
существенно больше толщины скин - слоя. В общем случае, по - видимому, на
этом торце нужно ставить граничные условия, учитывающие возможность диффузии
поля в пространство впереди ускоряемого тела. На границе y = 0 заданы
тангенциальные компоненты напряженности магнитного поля, соответствующие
бесконечно тонким и длинным прямолинейным проводникам с током, подсоединенным
к центру рельса. Исследование [3] осуществлено на примере рельсотрона,
соответствующего реально используемым на практике устройствам [37, 38]. Далее
результаты расчета такой модели будут сравниваться с результатами
использования описанного в [1, разд. 2, п. 2] способа определения
тангенциальных компонент магнитного поля на торце области. Расчет данных вариантов в
[3, 4] проводился с целью проверки использованной физической модели
ускорителя, в которой задача решалась в короткой (по y) пространственной
области. На граничных по оси y торцах задавалось тангенциальное магнитное
поле бесконечно длинного и тонкого прямолинейного проводника. В качестве
контрольной сосредоточенной характеристики ускорителя была выбрана его
погонная индуктивность Lp. Эта величина является
одним из основных параметров, характеризующих работу устройства. Она может
быть определена различным образом. Наиболее часто (применительно к рельсотронам)
она является коэффициентом в произведении перед половиной квадрата полного
протекающего тока, дающего ускоряющую силу. В описываемых расчетах величина Lp
определялась из указанного соотношения. С увеличением расстояния от якоря
влияние граничных условий должно ослабевать, что должно выражаться в выходе
погонной индуктивности на некоторое постоянное значение. В приведенной ниже табл.
3.1 показаны значения погонной индуктивности для случая использования старых
граничных условий [3, 4] (первая строка) и значения, рассчитанные для
граничных условий работы [2] (см. также [1]). В проведенных расчетах ток
линейно по времени до t = 0.2 рос от нуля до
некоторой величины, оставаясь далее постоянным. Все данные таблицы
соответствуют одному моменту времени t = 0.27. Развитые в [2] граничные
условия значительно ближе к действительности. Поэтому можно рассчитывать, что
решение задачи с данными граничными условиями будет давать значения погонной
индуктивности, значительно быстрее сходящиеся к той же постоянной. Так и
произошло. Таблица 3.1. Погонная индуктивность
В последней колонке показана относительная разность значений в 1 - ой и 5 - ой колонках (делится на значение в 5 - ой). Более высокая скорость сходимости полученных данных ясно показывает, что граничные условия, полученные в [2], намного лучше соответствуют предположению о бесконечно длинных рельсах, чем старый вариант граничных условий. 2. Моделирование ускорителя с обратным токоподводом. Рассмотрим
электродинамический ускоритель с обратным токоподводом, схема которого
приведена на рис. 3.1. Он отличается от простейшей конструкции [1, рис. 1.2]
прежде всего наличием двух пар токопроводов, расположенных друг над другом.
По верхнему рельсу ток течет от начала ускорителя до его выхода, где
поворачивает в обратную сторону и втекает в ускоряемое тело с передней (по
направлению движения) стороны. При этом какая - то доля тока замыкается и
через хвостовую часть. Подробнее физико - технические детали такого
ускорителя описаны в [39, 40]. Напомним, что одной из основных проблем в конструировании
электродинамических ускорителей является борьба со скоростным скин-слоем,
суть которого состоит в концентрации тока на задней кромке контакта рельса и
ускоряемого проводящего тела. Рост скорости ведет к увеличению плотности тока
в этой зоне, плавлению и последующему испарению материала якоря. При этом
металлический электрический контакт переходит в плазменный, чему сопутствуют
эрозия канала и падение эффективности ускорения. Предполагается с помощью
обратного токоподвода расширить область перетекания тока в якорь и увеличить
скорость, при которой начинается испарение материала якоря.
| |||||||||||||||||||||||||||||
|
Рис. 3.1. а- Якорь со стержневой токовой арматурой, b- схема и
сечение канала с обратным токоподводом. Здесь D- калибр канала, d- толщина
обратного токоподвода, осуществляющего механический и электрический контакт
с якорем. |
|
|||||||||||||||||||||||||||
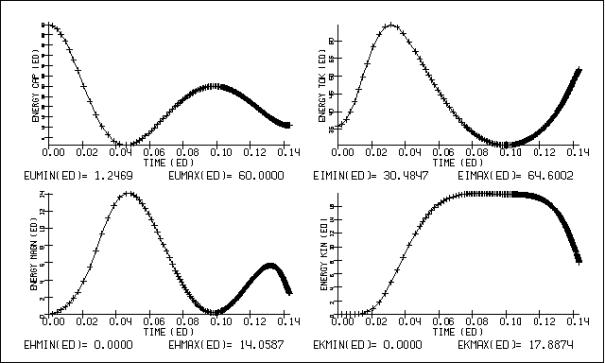
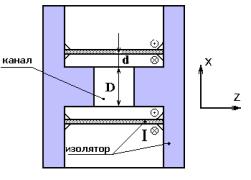
Рис. 3.2 поясняет картину перетекания
тока в ускорителе в случае использования якоря, показанного на рис. 3.1. Якорь
состоит из 8 токопроводящих стержней (показано сечение, проходящее через 3
крайние), пространство между которыми заполнено диэлектриком. Целью
моделирования является детальное исследование характера распределения тока в
якоре и изучение зависимости характеристик ускорителя с обратным токоподводом от
параметров конструкции.
Как и ранее, при моделировании будем
рассматривать не весь ускоритель, а лишь его часть, которая перемещается по
каналу вместе с ускоряемым телом. Наличие нескольких участков токоподвода
делает особенно актуальной задачу аккуратной постановки граничных условий на
торцах рассматриваемой области. Для их задания использован описанный в первой
части работы алгоритм [1, разд. 2].
Численное моделирование
показало, что ток протекает по внутренним поверхностям токовой петли,
образованной щелью между прямым и обратным токопроводами. В результате для
замыкания через якорь ток должен перетечь с внутренней поверхности этой петли
на контактную поверхность обратного токопровода - рельса, обращенную к
ускорительному каналу. Перетекание осуществляется как по боковым поверхностям
токопровода, так и путем диффузии тока через токопровод. Течение является
существенно трехмерным. Перетекание тока по поверхности ведет к попаданию
значительной доли тока не в переднюю, а заднюю по ходу движения, часть якоря.
Рис. 3.2. Картина
течения токов (показаны условные линии тока) в рельсотроне с обратным токоподводом.
Типичное распределение
индукции магнитного поля в плоскости сечения z = const, проходящего по каналу
ускорителя через 2 средних стержня (см. рис. 3.1), показано на рис. 3.3 при
полном токе ускорителя I = 10 кА. На рис. 3.3.a показана компонента Bz,
ортогональная направлению движения. Xорошо видно присутствие сильного
магнитного поля впереди ускоряемого тела. Это поле ведет к уменьшению
ускоряющей силы по сравнению с рельсотроном обычной конструкции. Значительное
поле присутствует между двумя направляющими. Здесь наличие поля ведет к
появлению дополнительного магнитного давления, поджимающего нижний рельс к
якорю и улучшающего электрический контакт. Рис. 3.3.b и 3.3.c показывают,
соответственно, распределения компонент By и Bx в том же
сечении. Два отрицательных экстремума на рис. 3.3.b соответствуют полю от x-ой
компоненты плотности тока, протекающей через крайние (по y и z) стержни и
являющейся максимальной в якоре. Две пары экстремумов на рис. 3.3.c для Bx
соответствуют подтекающим к стержням по нижней поверхности рельсов у - ой
компоненте плотности тока и z-ой компоненте того же вектора (отрицательной по
величине). Рисунки показывают существенную
разницу амплитуд компонент. Максимальные значения соответствуют рис. 3.3.a. На
рис. 3.3.d показано распределение продольной (вдоль стержней) компоненты
плотности тока в сечении x = const, лежащем вблизи плоскости симметрии x = 0.
Уже данный рисунок показывает, что большая часть тока проводится первой (по
стволу и направлению движения) парой стержней.
Интересно отметить некоторые
особенности результатов предварительных численных экспериментов, полученных
при моделировании ускорения стержневого якоря в рельсотроне с обратным
токоподводом.
Магнитное поле Bz перед
якорем и позади него на рис. 3.3 создается как токами, протекающими через
стержни якоря, так и токами обоих токоподводов. При этом, поскольку
собственное поле токов якоря не участвует в формировании ускоряющей силы,
тормозящее поле Bz от токоподводов можно оценивать по величине на
передней границе области, в которой ищется решение. На рис. 3.3 видно, что
величина Вz там мала по сравнению с аналогичной величиной на задней
границе. Тем не менее распределения полей на передней и задней (по y) границах
области меняются со временем из-за диффузии магнитного поля (и токов) в тело
токопроводов.
Это приводит к изменению во времени
ускоряющей силы F, действующей на якорь, которая в данных расчетах
определялась интегрированием величины H
´ j по области
якоря. Характерно, что для обычной конфигурации канала рельсотрона эффективная
величина погонной индуктивности Lp, входящая в выражение для силы, несколько увеличивалась
со временем, в то время как Lp для канала с обращенным токоподводом, наоборот, уменьшалась.
Последнее обстоятельство можно объяснить увеличением магнитного потока между
прямым и обратным токоподводами за счет диффузии поля и соответствующим
увеличением индукции магнитного поля перед якорем. Изменение размера области
трехмерного счета от 1 до 2 калибров вперед и назад от якоря практически не
влияло на результат расчетов.
|
|
|
|
|
A |
B |
|
|
|
|
|
|
C |
D |
|

Рис. 3.3.
Распределения компонент вектора магнитной индукции и плотности тока
Один из самых интересных результатов
моделирования – это полученные распределения тока между стержневыми
проводниками якоря. Для канала с обратным токоподводом их зависимости от
времени в интервале от начального момента до t = 0.5 мс приведены в виде
графиков 1 - 5 на рис. 3.4. Графики 1, 3 и 5 соответствуют парным стержням -
токопроводам на рис. 3.1, имеющим одинаковую координату y, а графики 2 и 4 - одиночным стержням, расположенным в средней
плоскости якоря. Отсчет нумерации идет с задней по ходу движения стороны
якоря. Аналогичные зависимости для токов стержней якоря в обычном канале
приведены на рис. 3.5. Их сравнение показывает, что, несмотря на близкое
соотношение токов в начале процесса, в канале с обратным токоподводом ток к
моменту времени t = 0.3 мс практически равномерно распределен по всем
проводникам. В обычном канале отношение между токами в стержнях слабо меняется
с течением временем и составляет от 2.5 до 10. Таким образом, судя по данной
характеристике, исходные предпосылки о целесообразности использования канала с
обратным подводом тока оказались оправданы.
На распределении токов по разным зонам
сплошного якоря, выполненного в виде проводящего параллелепипеда, можно
видеть, что в течение всего исследуемого промежутка времени более половины
полного тока сконцентрировано на задней границе якоря, что должно приводить к
более высокой плотности тока, чем для якоря со стержневой токовой арматурой.
Распределение тока в этом же якоре в средней плоскости между рельсами показывает,
что ток со временем стремится к равномерному распределению по зонам, однако
это обычная диффузия поля, отличная от ярко выраженного эффекта скоростного
скинирования тока на контактной поверхности.
Рис. 3.4.
Распределение тока между стержневыми проводниками для рельсотрона с обратным
токоподводом.
Рис. 3.5. Распределение тока между стержневыми проводниками для
рельсотрона обычной конструкции.
В описываемой работе не ставилась цель
исследования зависимости критической скорости от различных характеристик. Все
расчеты выполнялись с начальной скоростью тела, равной 0.9 км/сек и близкой
критической скорости для обычной ситуации [3, 4]. Поэтому во всех достаточно
протяженных по времени расчетах достигалась критическая скорость, т.е.
начиналось плавление и кипение материала якоря. Здесь также наблюдается
существенное различие пространственно трехмерных и двумерных расчетов. В
случае трехмерного моделирования зависимость максимальной по пространству
температуры от времени имеет «полочку» при достижении ею температуры кипения.
Так, например, для варианта с прямым токоподводом она тянется от t = 0.13 мс
до t = 0.16 мс. Наличие «полочки» объясняется течением тока по задней стороне
якоря. Первой начинает плавиться угловая точка. При этом увеличивается
сопротивление данного участка. В результате ток начинает перераспределяться
вдоль задней кромки якоря, что ведет к плавлению следующего участка и т.д. Это
происходит до начала плавления всей задней кромки якоря, после чего уже
температура начинает повышаться далее. В пространственно двумерных расчетах,
описанных, например, в [3], такой участок не наблюдался. Это соответствует
использованному приближению, в котором все точки задней кромки являются
равноправными и начинают плавиться одновременно.
Таким образом, предварительные
результаты расчетов показали достаточно сложную картину распределения
электромагнитных и тепловых полей в реальном трехмерном ускорителе с обратным
токоподводом.
3. Расчеты погонной индуктивности рельсотронов.
Погонная индуктивность Lp
ускорителя является одним из его основных параметров. Полученные данные
показывают ее заметное уменьшение в канале с обратным токоподводом до Lp
= (1,4 – 1,2) 10-7 Гн/м при толщине обратного токоподвода d = (1 –
5) 10-3м.
Приведем кратко анализ этого вопроса
из [41]. На рис. 3.6 приведена зависимость ускоряющей силы F(t) = ò[B ´ j]dv от
времени, вычисленная для якоря (в канале рис. 3.1) в трехмерном приближении, и
величина «ускорительной» погонной индуктивности Lуск=Lbreech
– Lmuzzle, вычисленная на границах области. «Ускорительная»
индуктивность вычислялась через магнитный поток, пронизывающий свободный
канал. Таким образом, влияние магнитного поля в остальных зонах поперечного
сечения токопроводов, дающее вклад в «электротехническую» индуктивность
контура, было исключено.
Из графиков видно, что ускоряющая сила
F и «ускоряющая» погонная индуктивность ведут себя синхронно, уменьшаясь со
временем. При расширении зоны анализа с 2 до 4 калибров якоря совпадение
результатов становится лучше. Двумерные решения на границах были использованы
в качестве граничных условий для трехмерной зоны. Поскольку в двумерных
сечениях решалась полная задача диффузии магнитного поля, приведенные величины
Lbreech и Lmuzzle позволяют понять причины такого
резкого снижения эффективности ускорения. На кривой 5 рис. 3.6 видно, как
резко растет индуктивность Lmuzzle, хотя с самого начала ее
предельно уменьшили, положив минимальную толщину изоляции d1 = 0.5
мм (рис. 3.1). С течением времени узкая щель, определяющая величину магнитного
потока в канале впереди якоря, расширяется «диффузионным» способом до величины
df, а магнитное поле впереди якоря, согласно расчетам, через 500
мкс может уже начать торможение ускоренного якоря. Проведенные дальнейшие
расчеты показали, что изменение толщины внутреннего рельса существенной роли
не играет из – за диффузии поля во внешний рельс. Поэтому такая система в ее
оригинальной трактовке, как лабораторный ускоритель с длиной ~ 1-2 метра и
миллисекундным временем ускорения, неперспективен.
Рис. 3.6. 1 –
нормированная на квадрат полного тока удвоенная ускоряющая сила 2 F(t) / I2
= 2 ò [[B ´ j]] dv / I2 при размере трехмерной зоны счета,
равном 2 калибрам канала, 2 - то же при размере зоны 4 калибра, 3 -
«ускоряющая» погонная индуктивность Lуск = Lbreech - Lmuzzle,
4 - Lbreech, 5 - Lmuzzle.
После такого рассмотрения становится
ясно, что одна из причин, почему в ускорителе с обратным токоподводом,
использующем плазменный якорь, не наблюдались сильные неустойчивости [42], это
компактирование токов магнитным полем, оказывающим давление и на переднюю
границу якоря.
Для выходных каскадов, или
даже для большей части канала ускорения необходимо принимать меры по
сохранению плазменного якоря (при ускорении с его использованием) от
разрушения или возобновлению его компактной конфигурации. Приведенные в [41]
данные по компактированию плазменного якоря в комбинированном рельсотроне,
одной из секций которого является рельсотрон с обратным токоподводом,
свидетельствуют о возможности использования указанного свойства для повышения
эффективности работы электромагнитного ускорителя.
Как показывают результаты
многочисленных исследований, рельсотроны классической конструкции не позволяют
достичь желаемых скоростей. Продвижение возможно при использовании ускорителей
либо со сложной топологией токоподводов, либо с использованием нетрадиционных
материалов, в том числе способных организовать устойчивый токоперенос в зоне
якоря. Во всех случаях обойтись без математического моделирования невозможно.
4. Заключение.
В данной работе совместно
с [1] представлены системы математического моделирования явления
электромагнитного разгона и торможения проводящих макротел. Целью такого
физического процесса является либо преобразование энергии электромагнитного
поля прямо в кинетическую энергию тела, либо преобразование самой
электромагнитной энергии за счет введения промежуточного разгона – торможения
проводящего тела в магнитном поле. Образцы решаемых задач соответствуют
различным пространственным приближениям, включая трехмерное.
При математическом и, тем
более, численном моделировании неизбежно приходится делать некоторые
допущения. В задачах преобразования энергии обязательным является выбор
моделей, адекватным образом описывающих энергетику процесса. Это проявляется
как на уровне дифференциальных моделей, так и на уровне конечномерных. Данное
требование предполагает использование консервативных или, при возможности,
полностью консервативных разностных или конечноэлементных схем. Вторым
качественным отличием является использование однородных по подобластям с резко
неоднородными характеристиками методов. Эти качественные особенности
использованного подхода соответствуют стилю работ [6, 24, 25, 43].
Несмотря на сравнительную
простоту протекающих при электромагнитном ускорении – торможении процессов и
на использование в основе модели классической системы уравнений Максвелла, при
моделировании необходимо решить ряд принципиальных вопросов. Они порождены
пространственной многомерностью задачи, нестационарностью, наличием областей с
кардинально отличающимися электро- и теплофизическими параметрами, наличием
резко разномасштабных как по времени, так и по пространству явлений, фазовых
превращений веществ и т.д. При этом отсутствуют надежные данные о трении тел
при гиперскоростях, неясен механизм перетекания тока в подвижном контакте,
равно как и возможность образования плазмы, плазменных или жидких струй
металла. Указанные сложности свидетельствуют о том, что в полном объеме
построение и реализация математической модели электромагнитного ускорения -
дело будущего.
Тем не менее ряд проблем
удалось решить. Наиболее важные из них следующие:
-
Построена и обоснована
модель электромагнитного разгона проводящих макротел на основе
квазистационарного приближения системы уравнений Максвелла при наличии
диэлектрических подобластей. Модель описывает явления практически однородным
по подобластям с различным типом проводимости образом.
-
Разработана модель
ускорения, позволяющая вести решение задачи в короткой подвижной области, на
торцах которой поставлены специальные граничные условия.
-
Предложена схема учета
особенностей как конструкции канала и якоря, так и специфических эффектов
электродинамики, связанных с высокой (порядка 1 км/с) скоростью перемещения и
скоростью нагрева якоря до фазовых переходов включительно.
-
Разработана модель
процесса электродинамического ускорения пластинчатого металлического лайнера в
устройствах обострения мощности.
-
На основе математических
моделей разработаны и реализованы соответствующие вычислительные алгоритмы для
численного моделирования. Разработаны вычислительные алгоритмы на основе
методов конечных разностей и конечных элементов.
Все построенные модели позволяют
описывать преобразование электромагнитной и кинетической энергии
самосогласованным образом. Проведенные вычисления позволили получить ряд
важных качественных и количественных характеристик процесса ускорения. Это
позволяет надеяться, что вычислительный эксперимент в этой важной области
будет развиваться опережающими физический эксперимент темпами.
5. Благодарности.
Автор выражает свою благодарность Ю.П. Попову, А.П. Лотоцкому и другим своим коллегам, результаты совместных работ с которыми отражены в настоящей статье.
Представленные результаты получены за
последние 10 - 15 лет. В настоящее время тематика таких исследований частично
поддерживается грантами РФФИ (проекты № 00 – 01 – 00169 и № 00 – 02 – 16130) и
контрактом с Минпромнауки РФ.
6. Список литературы
1. М.П. Галанин.
Компьютерное моделирование в задачах конвертирования электромагнитной и
кинетической энергии. Задачи и модели. // Информационные технологии и
вычислительные системы. В печати.
2. М.П. Галанин, А.П.
Лотоцкий, Ю.П. Попов, С.С. Храмцовский. Численное моделирование
пространственно трехмерных явлений при электромагнитном ускорении проводящих
макротел // Математическое моделирование. 1999.
Т. 11. N 8. С. 3-22.
3. М.П. Галанин, Ю.П.
Попов. Квазистационарные электромагнитные поля в неоднородных средах.
Математическое моделирование. М., Наука, Физматлит, 1995, 320 с.
4. М.П. Галанин, В.П.
Игнатко, Ю.П. Попов, С.С. Храмцовский. Пространственно трёхмерные расчеты
электродинамического ускорения проводящих макротел. // ЖТФ. 1995, т. 65, вып.
6, с. 9-20.
5. И.Е. Тамм. Основы теории
электричества. М., Наука, 1989, 504 с.
6. Самарский А.А., Попов Ю.П.
Разностные методы решения задач газовой динамики. М.: Наука, 1980. 352 с.
7. Э.А. Азизов, С. Г. Алиханов, Е.П. Велихов, М.П.Галанин,
В.А. Глухих, Е.В. Грабовский, А. Н. Грибов, Г.И. Долгачев, А.М.
Житлухин, Ю.Г. Калинин, А.С. Кингсеп, А.И. Кормилицын, В.П. Ковалев, М.К.
Крылов, В.Г. Кучинский, В.А. Левашов, А.П. Лотоцкий, С.Л. Недосеев, О.П.
Печерский, В.Д. Письменный, Ю.П. Попов, Г.П. Рыкованов, В.П. Смирнов, Ю.А.
Халимуллин, В.И. Четвертков. Проект «Байкал».- Отработка схемы генерации
электрического импульса. // Вопросы атомной науки и техники. Сер. Термоядерный
синтез. 2001. №. 3. С.с. 3 - 17.
8. Н.Е. Кочин, И.А. Кибель, Н.В. Розе.
Теоретическая гидромеханика. Часть 1. М., Гос. Изд. Физматлит. 1963. 584 с.
9. Н.Е. Кочин, И.А. Кибель, Н.В. Розе.
Теоретическая гидромеханика. Часть 2. М., Гос. Изд. Физматлит. 1963. 728 с.
10. Д. Поттер. Вычислительные методы в
физике. М. Мир. 1975. 392 с.
11. Г.В. Логвинович. Гидродинамика
течений со свободными границами. Киев. Наукова думка. 1969. 216 с.
12. Г.И. Марчук, В.И. Агошков.
Введение в проекционно - сеточные методы. М., Наука, 1981, 416 с.
13. Д. Норри, Ж. де Фриз. Введение в
метод конечных элементов. М., Мир, 1981, 304 с.
14. П. Сильвестер, Р. Феррари. Метод
конечных элементов для радиоинженеров и инженеров – электриков. М., Мир, 1986,
229 с.
15. А. Джордж, Дж. Лю. Численное
решение больших разреженных систем уравнений. М. Мир. 1984. 333 с.
16. В.В. Воеводин, Ю.А. Кузнецов.
Матрицы и вычисления. - М.: Наука, 1984. - 320 с.
17. C.W. Hirt, J.L. Cook, and T.D. Butler. A
Lagrangian Method for Calculating the Dynamics of an Incompressible Fluid with
Free Surface. // J. of Comput. Physics, 1970, v. 5, № 1, p.p. 103 – 124.
18. В.А. Смирнов, И.В. Старшинова, И.В. Фрязинов.
Математическое моделирование процессов выращивания монокристаллов по
Чохральскому. // Математическое моделирование. Получение монокристаллов и
полупроводниковых структур. Под ред. А.А. Самарского, Ю.П. Попова, О.С.
Мажоровой. М., Наука, 1986 200 с. С. 40 – 59.
19. V.P. Smirnoff, Ye.V. Grabovskii, А.М. Gytlukhin, V.V.
Кuznetsov, V.F. Levashov, А.P. Lototskii, М.P. Galanin, Yu.P. Popov. The
Pulsed Magneto – Cumulative Power Sharpener with the Electromagnetic Liner
Acceleration. // The 3rd Workshop on Magneto – Plasma – Aerodynamics
in Aerospace Applications. Moscow. 24 – 26 April 2001. Proceedings. V.A.
Bityurin (Ed.). Moscow. IVTAN. 2001, 443 p. P.p. 301 – 306.
20. М.П. Галанин, А.П. Лотоцкий. Математическое
моделирование электродинамического ускорения плоских пластин в лабораторном
магнитокумулятивном генераторе. // Мат. моделир., 2002 г., в печати.
21. 38. E.M. Drobyshevski, S.V. Yuferev. The Use of Conducting Shields
for Increasing the Operating Current Limit in a Rail Launcher // IEEE
Transactions on Magnetics. 1995. V. 31. № 1. P.p. 291 – 294.
22. М.П. Галанин, А.В.
Плеханов, В.В. Савичев. Исследование поведения металлического контакта при
электродинамическом ускорении проводящих тел. // Теплофизика высоких температур,
1996, т. 34, № 2, с. 293-298.
23. М.П. Галанин, В.В.
Савичев. Особенности электромагнитного поля и их проявления при моделировании
электрического контакта проводящих тел в электродинамическом ускорителе типа
рельсотрон. // Теплофизика высоких температур, 1997, т. 35, № 4, с. 517-523.
24. Тихонов А.Н., Самарский А.А.
Уравнения математической физики. М.: Наука, 1972. 736 с.
25. А.А. Самарский, Б.Д.
Моисеенко. Экономичная схема сквозного счета для многомерной задачи Стефана.
// ЖВМ и МФ, 1965, т. 5, № 5, с. 816-827.
26. М.П. Галанин, А.Д.
Лебедев, А.П. Лотоцкий, К.К. Миляев. Тепловые и электромагнитные процессы на
контактах электродинамического ускорителя // Препр. Инст. прикл. матем. им.
М.В. Келдыша РАН, 2000, N 42. 32 с.
27. M.P. Galanin, A.D. Lebedev, K.K. Milyaev.
An Investigation of the Effects of Some Properties of Materials on the
Characteristics of Armature Acceleration in a Railgun // IEEE Transactions on
Magnetics. Vol. 37. N. 1. January 2001. P.p. 411 – 415.
28. Critchley R., Leyden C. A Review of MHD
techniques for electric launchers at DRA// 4th European Simposium on
Electromagnetic Launch Technology, Celle, Germany, May 1993.
29. Kinner P. Soft coupling of a 3D
electromagnetic code with a 3D fast transient dynamics code to model rail
guns// 4th European Symposium on Electromagnetic Launch Technology, Celle, Germany,
May 1993.
30. Atkinson S.P. The Use of Finite Element
Analysis Techniques for Solving Rail Gun Problems// IEEE Trans. Magn. 1989. V.
MAG - 25, № 1. P. 52- 56.
31. D.Rodger, Leonard P.J., Eastham J.F.
Modelling Electromagnetic Rail Launchers at Speed Using 3D Finite Elements //
IEEE Trans. Magn. 1991. V. MAG - 27, № 1. P. 314- 317.
32. C. Leyden, R. Critchley, J.A. Downey. 3D Softly Coupled
Electromagnetic / Thermal / Structural Analysis Using MEGA – DYNA3D // 6th
European Symposium on EML Technology (The Hague, 25-28 May 1997). Proceedings.
P.p. 165-169.
33. R. Critchley, C. Leyden, A.P.J. Argyle. The Use of Coupled EM –
Hydro Finite Element Techniques for the Design of Railguns // IEEE
Transactions on Magnetics. 1995. V. 31. № 1. P.p. 576 – 581.
34. J. Tailor, R. Crowford, D. Keefer. Muzzle – Fed Railgun Experiments
with 3 – D Electromagnetic Simulations // IEEE Transactions on Magnetics.
1995. V. 31. № 1. P.p. 360 – 364.
35. A. Schoolderman. On Electromagnetic S – Dimensional Effects in
Square – bore and Round – Bore Rail Accelerators // 6th European Symposium on
EML Technology (The Hague, 25-28 May 1997). Proceedings.
P.p. 109-116.
36. D. Rodger. A Comparison of Formulations for 3d Finite Element
Modeling of Electromagnetic Launchers. // IEEE Trans. Magn. 2001. V. MAG - 37,
№ 1. p. 135 - 138.
37. "Материалы I Всесоюзного семинара по динамике сильноточного дугового разряда в магнитном поле" (Новосибирск, 10-13 апреля 1990 г.), под ред. М.Ф. Жукова, Новосибирск, изд. Инст. Теплофизики СО АН СССР, 1990, 350 с.
38. "Материалы II
Всесоюзного семинара по динамике сильноточного дугового разряда в магнитном
поле" (Новосибирск, 4-6 декабря 1991г.), под ред. В.Е. Накорякова, Новосибирск,
изд. Инст. Теплофизики СО РАН, 1992, 367 с.
39. A.P. Lototsky,
Yu.A. Kareev, A.A. Nikolashin, Yu.A. Halimullin, E.P. Polulyah, M.P. Galanin, S.S. Khramtsovsky. Recent
Muzzle-Fed Railgun Experiment on Metal Armature for Arcless Acceleration. //
IEEE Trans. On Magn., 1999, V. 35. N 1. P.p. 79-85.
40. Yu.A. Kareev, A.P. Lototsky, Yu.A. Halimullin. Metal Projectile
Acceleration in Muzzle - Fed Railgun. // 6th European Symposium on
EML Technology (The Hague, 25-28 May 1997). Proceedings, p. 314-321.
41. А.П. Лотоцкий, Ю.А. Халимуллин, М.К. Крылов, В.В. Кузнецов, В.В. Савичев, М.П. Галанин. Магнитная конфигурация канала
рельсотрона с обращенным токоподводом. Перенос тока в зоне якоря.// Препринт
ТРИНИТИ № 0083 – А. г. Троицк Моск. обл. 2001 г. 24 с.
42. J.V. Parker.
Why plasma armature railguns don’t work (and what can be done about it) //
IEEE Trans. on Magn. 1989. Vol. 25. № 1. P.p. 418 - 424.
43. А.А. Самарский, А.В. Гулин. Численные методы математической физики. М. Научный мир. 2000 г. 316 с.