|
МЕТОДЫ МОДЕЛИРОВАНИЯ
И ДИСТАНЦИОННОГО
Специальность 01.02.01 – Теоретическая механика А в т о р е ф е р а
т
ОБЩАЯ ХАРАКТЕРИСТИКА РАБОТЫ На многих российских и международных конференциях отмечалось, что в настоящее время значительный интерес в плане научных исследований и практического применения представляют дистанционно управляемые роботы. Это вызвано тем, что развитие новых технологий обуславливает возможность применения роботов в широком диапазоне задач, в которых требуется дистанционное присутствие оператора-эксперта. К их числу относятся применение роботов в местах экологических и техногенных катастроф, для исследования и обезвреживания подозрительных предметов в местах массового скопления людей, использование дистанционно-управляемых объектов для военных применений, использование роботов для сборки космических конструкций, проведения дистанционных экспериментов на международной космической станции (МКС). Новым перспективным приложением является использование роботов, управляемых через Интернет, для дистанционного обучения робототехнике. В диссертации рассмотрены задачи, решение которых позволило выработать некоторые новые подходы к моделированию и дистанционному управлению движением роботов. Разработаны эффективные методы моделирования динамики роботов. Они были использованы для моделирования движений схвата бортового манипулятора космического корабля “Буран” на имитационном стенде-тренажере. Предложены и отработаны новые методы дистанционного управления роботами через сеть Интернет. Разработаны методы управления роботами при их взаимодействии с подвижными объектами. Эти методы позволили решать задачи дистанционного управления роботами в динамически изменяющихся средах. Для обучения операторов
навыкам дистанционного управления необходима разработка тренажеров, воспроизводящих
особенности динамики движения роботов в требуемых рабочих условиях. В частности,
для работы с космическими манипуляторами необходимо воспроизводить движение
в условиях невесомости. Имитация движения должна выполняться в масштабе
реального времени для формирования у операторов правильных навыков работы.
Существующие системы моделирования космических манипуляторов, созданные
в NASA (A. Hajare, 1989, S. Olendorf, 1991), ESA (J. Prince, P. Dieleman,
1989), ряде организаций нашей страны (Е.И. Юревич, 2002, В.П. Богомолов,
1993) используют мощную вычислительную базу, сложную вычислительную технику.
Поэтому актуальна разработка эффективных методов моделирования, позволяющих
реализовать качественный, универсальный тренажер на стандартной технике
в лабораторных условиях.
Актуальность разработки данных методов обусловлена тем, что они могут применяться для моделирования различных типов манипуляторов (крупногабаритных манипуляторов, манипуляторов для экстремальных сред), непосредственные эксперименты с которыми трудно проводить в лабораторных условиях. Актуальность работы по этому направлению подтверждается также тем, что она выполнялась в рамках исследований, проводимых в соответствии с Федеральной космической программой (программы “Пилот” и “Обслуживание”), международным проектом INTAS-94-1234, а также в соответствии с выполнением ряда НИР. Новое перспективное направление научных исследований, имеющее важное практическое значение – дистанционное управление роботами в среде Интернет. Среди возможных приложений – дистанционное обучение (G.Hirzinger,1998), удаленное управление автоматизированными производствами (R.Luo, 1999), использование дистанционно-управляемых роботов для медицинских приложений (A. W.T. Ho, I. Elhadjj, 2001), для работы в экстремальных средах (J. Yuh, 2000). Список разработанных к настоящему времени систем управления роботами через Интернет представлен на сервере телеробототехники NASA (http://rainer.oact.hq.nasa.gov/telerobotics_page/telerobotics.shtm). Из отечественных разработок отметим систему дистанционного управления натурной моделью бортового манипулятора космического корабля "Буран", разработанную в ЦНИИРТК (В.А. Лопота, В.С. Заборовский, 2002) и систему управления лабораторными манипуляторами МИРЭА (И.М. Макаров, В.М. Лохин, С.В. Манько, М.П. Романов, 2001 и 2002). Однако, прогресс в этой области сдерживается ограничениями сети Интернет на скорость передачи информации. Основная проблема управления через Интернет - наличие существенных произвольных временных задержек в канале связи. Это делает управление через Интернет затруднительным, а во многих случаях невозможным. Разработанные к настоящему времени системы, управление роботами в которых основано на передаче телеизображений, обладают такими недостатками, как наличие существенных задержек в канале обратной связи и неудобная для оператора среда управления. Помимо существенных задержек при передаче видеоизображений, их размер и качество затрудняют оператору оценивание положения робота и расстояний между объектами рабочего пространства. Для преодоления этих недостатков актуальной является разработка новых методов повышения эффективности управления роботами через Интернет. Они основаны на использовании виртуальных трехмерных моделей робота и его рабочего пространства в on-line режиме (режиме реального времени). Идея подхода состоит в том, что вместо больших по объему видео изображений передается минимальный набор параметров, однозначно определяющих состояние робота и его рабочей среды (набор обобщенных координат робота и координаты объекта, с которым он взаимодействует). Для определения координат объектов используется система технического зрения. В случае, если пропускной способности канала все же оказывается недостаточно для организации работы в реальном времени, используются кинематические и динамические модели движения робота и объектов рабочей среды. Таким образом, предлагается использование “виртуального дублера” реальной рабочей среды для непосредственного управления реальным роботом, а не только для моделирования его работы, как это обычно использовалось ранее (A. Bejczy, 1995, T. Kotoku, 2001). Это позволяет не только свести к минимуму задержки реакции системы на управляющие воздействия (за счет минимизации пересылаемых данных), но и обеспечить для оператора комфортную управляющую среду с возможностью смены направления обзора, увеличения деталей сцены, использования полупрозрачных изображений. Использование предложенных методов обеспечило возможность эффективного управления даже для низких скоростей передачи информации (в среднем порядка 0.1 – 0.5 Кб/сек) при использовании каналов связи общего пользования. Для выполнения повторяющихся действий в автоматическом режиме разработан язык и среда дистанционного программирования движения роботов через сеть Интернет. Актуальность предложенных методов обусловлена тем, что они применимы к широкому классу систем дистанционного управления роботами с задержками в каналах связи. Особую сложность представляет класс задач, в которых робот должен функционировать в динамически изменяющейся рабочей среде (С.Л. Зенкевич, Р.В. Заединов, 2002, W. Hong, J.-J. Slotine, 1995, B. Bishop, 1998, D. Koditshek, 1994, H. Fassler, 1990). Для решения задач взаимодействия робота с подвижными объектами (их захвата, отслеживания траектории, ударного воздействия и т.п.) необходима разработка методов оценивания текущего положения объектов с помощью системы технического зрения, а также методов прогнозирования движения объектов и координированного управления роботом. Были решены задачи управления в автоматическом режиме роботом-манипулятором в случае захвата стержня на бифилярном подвесе и взаимодействия со сферическими маятниками. Использование динамических моделей объектов позволило не только определять и прогнозировать их фактическое движение, но и анализировать некоторые нетривиальные случаи изменения этого движения. Работы по этому направлению были выполнены в рамках исследований, проводимых в соответствии с Программой сотрудничества между Национальным центром научных исследований Франции CNRS и РАН (CARRA). Исследования поддержаны грантами РФФИ N 96-01-01003 и N 99-01-00981. Наконец, одной из самых интересных задач является задача взаимодействия с подвижными объектами при управлении роботом через сеть Интернет. Сложность задачи обусловлена наличием задержек в канале связи между роботом и оператором. Для решения задачи применялись методы, основанные на использовании системы технического зрения и прогноза движения объекта с помощью модели динамики его движения. Также использовался метод “распределенной автономии”, при котором удаленный оператор выполнял планирование операций на высоком уровне, а сами они выполнялись автоматически на стороне робота. Актуальность разработанных подходов и методов обусловлена тем, что они могут быть использованы при решении сложных задач взаимодействия роботов с подвижными объектами или управления в сложных неструктурированных динамических средах. Актуальность исследований по разработке методов управления роботами через Интернет подтверждается также тем, что они выполнялись в рамках работ, проводимых в соответствии с Комплексной программой научных исследований Президиума РАН, Федеральной целевой программой “Интеграция высшего образования и фундаментальной науки”, Программой сотрудничества между Национальным центром научных исследований Франции CNRS и РАН (CARRA). Исследования поддержаны грантом РФФИ N 02-07-90223, совместными грантами CNRS-РАН SPI 9559 и 12257. Работа по этому направлению получила вторую премию на конкурсе INTAS, проводимом среди молодых ученых стран СНГ (Белоусов, 2001). Цель работы состоит в создании методов математического и натурного моделирования роботов-манипуляторов и разработке алгоритмов для создания эффективных систем дистанционного управления роботами. Особое внимание уделено развитию методов управления роботами через сеть Интернет. Важной частью работы является исследование задач взаимодействия роботов с подвижными объектами со сложным динамическим поведением и использование полученных результатов для создания систем дистанционного управления в динамических средах с использованием подхода распределенной автономии. Научная новизна. Разработаны новые методы моделирования динамики манипуляторов с нелинейными элементами в приводах. Разработан эффективный в вычислительном плане метод формирования и расчета коэффициентов уравнений динамики манипуляторов в форме уравнений Лагранжа II рода. Для интегрирования уравнений динамики манипуляторов с нелинейностями в моделях приводов и упругими элементами в шарнирах разработаны эффективные алгоритмы на основе неявных методов. С помощью разработанных методов создан стенд натурного моделирования движения большого космического манипулятора. В работе предложен новый подход к созданию систем дистанционного управления роботами через сеть Интернет. Он основан на использовании эффективных алгоритмов обмена данными между контроллером робота и удаленным оператором, динамических моделей робота и объектов рабочей среды, и виртуальной среды управления (“виртуального дублера” робота и реальной рабочей среды), отображающей в реальном времени текущее состояние робота и его рабочего пространства. Впервые виртуальная среда используется не только для предварительной отработки операций, но и для непосредственного управления реальным роботом. Разработанные методы
позволили преодолеть влияние задержек сети Интернет и позволяют создавать
эффективные системы дистанционного управления роботами для медленных каналов
связи общего пользования.
Разработаны алгоритмы управления роботом-манипулятором при его взаимодействии с подвижными объектами с использованием в контуре управления системы технического зрения. Алгоритмы основаны на построении прогноза положения объектов с использованием моделей динамики их движения. Разработаны алгоритмы взаимодействия робота с подвижными объектами при управлении роботом через сеть Интернет. Впервые проведена успешная натурная отработка алгоритмов с использованием каналов связи общего пользования. Это открывает новые возможности по использованию управляемых через Интернет роботов для их работы в динамически изменяющихся средах. Все результаты диссертации являются новыми. Практическая ценность работы. Создано математическое и программное обеспечение комплекса натурного моделирования движения бортового манипулятора космического корабля “Буран”. Применение разработанных методов моделирования позволило организовать работу комплекса в масштабе реального времени, что дало возможность использовать его в качестве тренажера при обучении операторов. Результаты диссертации применялись в созданном в ЦНИИМАШ стенде-тренажере, который использовался для обучения космонавтов навыкам выполнения операций с манипулятором БКМ. Возможно применение разработанных методов и стенда для моделирования и натурного воспроизведения движения широкого класса роботов-манипуляторов. В частности, созданные алгоритмы использовались при моделировании динамики платформы наведения научной аппаратуры для проекта “Марс-98”. Разработанные методы управления роботами через сеть Интернет применимы к широкому классу систем дистанционного управления роботами с задержками в каналах связи. В частности, представляет интерес использование алгоритмов взаимодействия робота с подвижными объектами для моделирования, натурной отработки и непосредственного выполнения задач захвата объектов в космосе с помощью дистанционно управляемых робототехнических систем. Разработан набор стандартных интерфейсов и программных модулей "Интернет робототехника", включающий систему трехмерной визуализации робота и его рабочего пространства, модуль дистанционного программирования роботов, модуль передачи и отображения видеоинформации, интерфейсы оператора для управления мобильными и манипуляционными роботами, модуль сетевого обмена данными, модуль обеспечения безопасности работы систем управления с открытым доступом. С помощью этих модулей обеспечивается быстрая разработка систем управления через Интернет новыми типами роботов. В частности, были созданы системы управления через Интернет роботами-манипуляторами РМ-01 и CRS A465, а также мобильным роботом Nomadic XR4000. Особую актуальность
представляет создание на базе существующих и разрабатываемых
систем управления роботами через Интернет среды дистанционного обучения
и научных исследований. Принципиальная особенность таких систем – возможность
проведения экспериментов с реальным роботом и оборудованием – особенно
важна для университетов и других учебных заведений, не имеющих такого оборудования.
Были разработаны задачи практикума по мехатронике для студентов механико-математического факультета МГУ им. М.В. Ломоносова с возможностью дистанционного управления роботом-манипулятором через Интернет. Апробация работы. Основные результаты докладывались на научно-практической конференции “Применение ЭВМ в задачах механики” (Севастополь, 1991 г.), на научно-практической конференции “Космическая робототехника: проблемы и перспективы” (Калининград, 1991 г.), на научно-технической конференции “Роботы в экстремальных средах” (С.- Петербург, 1992, 2001 и 2002 г.г.), на Международной конференции по крупногабаритным космическим конструкциям ICOLASS’93 (Новгород, 1993 г.), на 7ой Международной конференции по перспективной робототехнике International Conference on Advanced Robotics ICAR'95 (Сант Фелью де Гуиксол, Испания, 1995 г.), на Международной конференции по интеллектуальным роботам и системам IEEE/RSJ International Conference on Intelligent Robots and Systems IROS’97 (Гренобль, Франция, 1997 г.) и IROS’2000 (Такаматсу, Япония, 2000 г.), на Международной конференции по робототехнике и автоматизации IEEE International Conference on Robotics and Automation ICRA'98 (Левен, Бельгия, 1998 г.) и ICRA'2001 (Сеул, Южная Корея, 2001 г.), на Международной конференции по адаптивным роботам и GSLT International Conference on Adaptive Robots and General System Logical Theory (С.- Петербург, 1998 г.), на научной школе-конференции “Мобильные роботы и мехатронные системы” (Москва, 1998 г. и 2001 г.), на Международной конференции по визуализации информации IEEE International Conference on Information Visualisation IV’99 (Лондон, Англия, 1999 г.), на 6ой Конференции английского общества виртуальной реальности Sixth UK VR-SIG Conference (Сэлфорд, Англия, 1999 г.), на Семинаре по распределенной робототехнике и автоматизации (Сеул, Южная Корея, 2001 г.), на VIII Всероссийском съезде по теоретической и прикладной механике (Пермь, 2001 г.), 11ом Международном семинаре по робототехнике International Workshop on Robotics RAAD-2002 (Балатонфюред, Венгрия, 2002 г.), на 33ем Международном симпозиуме по робототехнике International Symposium on Robotics ISR’2002 (Стокгольм, Швеция, 2002 г.), на совместном расширенном заседании Научного совета РАН по робототехнике и автоматизации производства и Учебно-методического совета Министерства образования РФ (Москва, 2002 г.), на семинаре по робототехнике в Институте кибернетики Нанта (IRCCyN-CNRS) под руководством проф. К. Шеваллеро, на семинаре по робототехнике в Лаборатории анализа и архитектур систем (LAAS-CNRS, Тулуза, Франция) под руководством проф. М. Галлаба, на семинаре по компьютерной графике Группы компьютерной графики в университете Де Монтфорт (DMU, Милтон Кейнс, Англия) под руководством проф. Г. Клапворси, на семинаре по робототехнике в парижской Лаборатории робототехники (LRP) под руководством проф. Ф. Бидо, на Всероссийском семинаре “Механика и управление движением роботов” на механико-математическом факультете МГУ им. М.В. Ломоносова под руководством акад. Д.Е. Охоцимского и проф. Ю.Ф. Голубева, на семинаре в ИПМ им. М.В. Келдыша РАН под руководством акад. Д.Е. Охоцимского, на семинаре по теоретической механике в МЭИ, на семинаре в Институте проблем механики РАН под руководством проф. В.Г. Градецкого, на семинаре по прикладной механике и управлению в Институте механики МГУ им. М.В. Ломоносова под руководством акад. А.Ю. Ишлинского. Разработанная система управления через Интернет роботом CRS A465 была успешно продемонстрирована во время "Дней цифровых технологий" (Монтэгю, Франция, 1999 г.). Возможности системы управления через Интернет роботом РМ-01 были продемонстрированы во время робототехнической выставки в рамках "Дня механико-математического факультета” в МГУ им. М.В. Ломоносова (Москва, 2001 г. и 2002 г.). В мае 2001 года во время Семинара по распределенной робототехнике и автоматизации в рамках Международной конференции по робототехнике IEEE International Conference on Robotics and Automation ICRA'2001 (Сеул, Южная Корея), был проведен успешный сеанс управления роботом РМ-01 через Интернет по обычному каналу связи (на расстоянии свыше 10000 км). На основе результатов диссертации подготовлен и прочитан спецкурс “Моделирование и дистанционное управление роботами через сеть Интернет” на механико-математическом факультете МГУ им. М.В. Ломоносова (спецкурс читается с февраля 2002 г.). Публикации. По результатам работы имеется 41 публикация, включая 13 статей в журналах и сборниках [1,5,14,20,23,25-26,32-33,36-37,40-41], 19 докладов на конференциях [3-4,7,9,11-13,15,18-19,21,27-31,34-35,38] (17 статей и 2 тезисов), 4 препринта [2,8,17,39], 2 отчета [6,10] и 3 электронные публикации [16,22,24]. Структура диссертации. Диссертация состоит из введения, шести глав, заключения и списка литературы, содержит 257 страниц текста, 71 рисунок. Список цитируемой литературы – 210 наименований. СОДЕРЖАНИЕ РАБОТЫ Во введении обоснована актуальность рассматриваемых задач, научная новизна разработанных методов, показана практическая значимость полученных результатов и кратко описано содержание диссертации. Первая глава посвящена описанию эффективных в вычислительном плане методов моделирования кинематики и динамики роботов-манипуляторов. Формирование уравнений динамики, которые могут быть рассчитаны на ЭВМ за минимальное время, является одной из важнейших задач в робототехнике. Ее решение необходимо как для моделирования динамики манипуляторов в масштабе реального времени, так и для разработки совершенных алгоритмов управления роботами с учетом динамики. В первой части главы дается обзор методов описания кинематики и динамики роботов. Представленные алгоритмы формирования уравнений динамики сравниваются по таким критериям, как возможность решать прямую и обратную задачи динамики, эффективность программирования, применимость к алгоритму символьных преобразований, замкнутость уравнений. Особое внимание уделяется анализу вычислительной эффективности рассматриваемых алгоритмов и их способности решать необходимую при моделировании манипуляторов прямую задачу динамики (определение движения манипулятора по действующим на него внешним моментам и силам). В разделе 1.2 приводится формализация метода последовательного формирования систем координат звеньев манипулятора для описания его кинематики. Для расчета кинематических и динамических величин используются матрицы преобразования координат размера 3х3 и вектора относительных перемещений. Показано применение метода для бортового манипулятора космического корабля “Буран” и промышленного робота-манипулятора РМ-01. В разделах 1.3 – 1.5, представлен метод расчета коэффициентов уравнений динамики манипуляторов в форме уравнений Лагранжа II рода. Метод применим для манипуляторов с вращательными и поступательными шарнирами, соседние оси которых перпендикулярны или параллельны. Получены уравнения
динамики в виде: или в матричной форме: В этих уравнениях D(q)
- симметричная, положительно определенная матрица инерции манипулятора
с элементами:
p - вектор гравитационных сил с компонентами:
Уравнения позволяют решать прямую и обратную задачи динамики. Хорошая алгоритмизуемость уравнений способствовала разработке простых и эффективных программ расчета динамики на ЭВМ. Использование матриц размера 3х3 и векторов относительных перемещений обеспечило высокую вычислительную эффективность расчета динамических коэффициентов по сравнению с традиционно используемыми однородными матрицами преобразований размера 4х4; разработанная программная реализация алгоритма расчета коэффициентов уравнений динамики позволяет проводить оптимизацию вычислительных затрат для конкретных типов манипуляторов. В частности, для манипулятора БКМ вычислительные затраты на расчет полной модели динамики составляют 3479 операций умножения и 2503 операции сложения. Использовались следующие модели динамики БКМ:
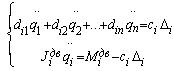
Вычислительные затраты, связанные с решением задач кинематики и динамики механической части робота составляют для этих моделей соответственно 837, 1269 и 951 операций сложения и умножения (с плавающей запятой) плюс вычисление 12 тригонометрических функций. Для компьютера AT 286/287, на котором был первоначально реализован моделирующий комплекс, затраты процессорного времени при решении этих задач составили 0.03, 0.045 и 0.035 сек. Численные эксперименты при исследовании динамики БКМ показали, что расчет новых значений динамических коэффициентов можно осуществлять один раз за такт управления моделирующим комплексом, который равен 0.35 сек. Таким образом, на каждом цикле, с учетом дополнительных затрат, связанных с вычислением программных скоростей, остается от 0.285 сек до 0.3 сек на интегрирование уравнений динамики. Специальные методы, описанные в главе 2, позволяют организовать процесс вычислений в реальном масштабе времени. В разделе 1.6 представлено использование языка символьных вычислений REDUCE для символьного вывода уравнений динамики манипуляторов. Приводится анализ вычислительной эффективности уравнений в символьном виде для манипуляторов с 2 и 3 степенями свободы. Для замыкания системы уравнений динамики получены выражения для обобщенных моментов в шарнирах. Они определяются типами и параметрами двигателей, механических передач (редукторов), а также особенностями системы управления робота. В разделе 1.7 рассмотрены электромеханические привода общего вида с двигателями постоянного тока, обратимыми зубчатыми редукторами и замкнутыми по положению и скорости следящими системами. Представлены различные по сложности модели приводов, в которых учитываются упругость в шарнирах и нелинейные элементы: люфт, муфты предельного момента, тормоза. Во второй главе описаны способы повышения скорости интегрирования уравнений динамики за счет использования неявных методов. С интегрированием уравнений динамики манипуляторов связаны наибольшие трудности при моделировании в реальном времени. Несмотря на существенную жесткость уравнений динамики большинства манипуляторов, во многих системах моделирования космических и других манипуляторов используются явные методы интегрирования, в которых приходится выбирать малый (порядка 10-3 – 10-5 сек) шаг интегрирования, чтобы обеспечить устойчивость вычислительной схемы. Рассмотрены особенности применения неявного метода Эйлера к решению систем уравнений динамики манипуляторов, линейных по скоростям, но имеющих нелинейные элементы в приводах и механических передачах (люфт, ограничения на напряжения и ток в обмотках электродвигателей, ограничения на максимальную величину момента в редукторе). Учитывается также упругость шарниров манипулятора. Разработано несколько интерполяционных алгоритмов, обеспечивающих устойчивость и высокую точность разностной схемы при интегрировании систем с указанными нелинейностями. При этом величина шага интегрирования может быть увеличена на 2-3 порядка по сравнению с явными методами. Ниже приведено описание наиболее полной неявной разностной схемы, реализующей интегрирование уравнений динамики манипулятора, механические передачи которого обладают люфтом и упругостью. В алгоритме учитывается также ограничения на ток и напряжение в двигателях. Уравнения динамики манипулятора с учетом различного вида
нелинейностей и упругостью в шарнирах имеют вид (с учетом -
упрощения модели динамики для медленных движений БКМ):
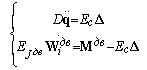
Представим их в матричном виде:
где через Ec обозначена диагональная матрица жесткости
шарниров, а
Уравнения (2) – (3) содержат неизвестные
Тогда система (2) – (3) будет содержать лишь неизвестные
где
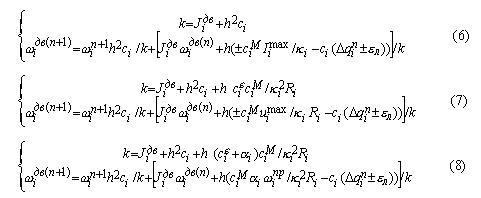
Формула для расчета
Тогда для (5) имеем соответственно:
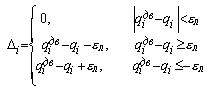
В (6) – (8) знак "+" берется при
Теперь можно перейти к решению уравнений (2). Представим их в виде:
В этих уравнениях
или, согласно (9):
Итак, уравнение по i-ой координате имеет вид:
если люфт не выбран, и, в противном случае:
Отсюда ясно, что для решения (10), т.е. для нахождения где Определив
3. Средние затраты машинного времени для получения решения
уравнений динамики БКМ на интервале времени DТ=1 сек составляют:
В третьей главе представлены архитектура, программное обеспечение и организация работы стенда-тренажера, предназначенного для воспроизведения движений схвата большого космического манипулятора – бортового манипулятора космического корабля “Буран”. Движение схвата манипулятора с учетом невесомости, инерции, упругости и нелинейностей в моделях приводов рассчитывается в вычислительной машине, а для физического воспроизведения движения его схвата используется промышленный робот РМ-01 с другой кинематической схемой и динамикой. Приводится обзор современных методов моделирования космических
манипуляторов и орбитальных систем, раскрыты преимущества и недостатки
различных подходов к созданию тренажеров и моделирующих комплексов.
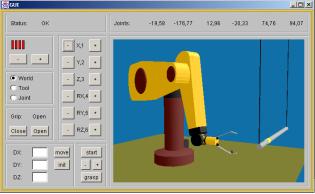
На разработанном макете стенда-тренажера исследовалось выполнение некоторых обслуживающих операций, выполняемых бортовым манипулятором космического корабля “Буран”. В частности, были рассмотрены операции захвата неподвижного объекта 1 (цилиндрической формы), его транспортировка и установка в накопитель 2 (см. рис.). Операции выполнялись в ручном и автоматическом режиме.
Целью экспериментов являлось:
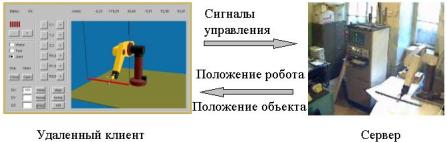
Проведенные серии экспериментов продемонстрировали способность стенда воспроизводить движение схвата БКМ в масштабе реального времени с точностью, достаточной для формирования у операторов правильных навыков работы с манипулятором (эта задача первоначально ставилась при разработке стенда). В четвертой главе рассмотрены вопросы разработки эффективных систем управления роботами через сеть Интернет. Разработанные к настоящему времени системы, управление роботами в которых основано на передаче телеизображений, обладают такими недостатками, как наличие существенных задержек в канале обратной связи и неудобная для оператора среда управления. Помимо существенных задержек при передаче видео изображений, их размер и качество не позволяют оператору оценивать положение робота и расстояния между объектами рабочего пространства. Для преодоления этих недостатков была разработана виртуальная среда управления. Использовались виртуальные трехмерные модели робота и его рабочего пространства в on-line режиме (режиме реального времени). Идея подхода состоит в том, что вместо громоздких видео изображений оператору передается минимальный набор параметров, однозначно определяющих состояние робота и его рабочей среды (набор обобщенных координат робота и координаты объекта, с которым он взаимодействует). Затем рабочая сцена визуализируется методами компьютерной графики. Использование при управлении “виртуального дублера” робота и рабочей среды обеспечивает быструю реакцию системы на действия оператора за счет минимизации потока передаваемых данных и обеспечивает эффективную работу даже при наличии существенных задержек в канале связи.
Анализ существующих систем управления роботами через Интернет приведен в разделе 4.1. Состав оборудования и программная реализация разработанных систем управления роботами через Интернет описаны в разделе 4.2. Особенности виртуальной среды дистанционного управления роботами представлены в разделе 4.3. Предложен метод использования полупрозрачных изображений, позволивший существенно сокращать время выполнения операций по захвату роботом различных объектов. Идея подхода состоит в том, что в модель схвата манипулятора добавляется полупрозрачное изображение захватываемого объекта в положении, идеальном для захвата. Задачей оператора является совмещение целевого объекта и его полупрозрачного изображения в схвате робота на компьютерной модели рабочей сцены. Для сигнализации об их совпадении цвет целевого объекта на модели изменялся, после чего осуществлялся гарантированный захват объекта и реконфигурация сцены.
Одной из основных задач, стоящих при разработке систем управления роботами через Интернет, являлось создание для оператора комфортной среды управления. Помимо трехмерной виртуальной среды она также содержит графический пульт дистанционного управления, представленный в разделе 4.4, и модуль дистанционного программирования роботов. Был разработан язык и среда дистанционного программирования, которые повышают эффективность планирования и выполнения сложных повторяющихся операций. Реализована возможность программирования роботов в off-line и on-line режимах. Особенности системы дистанционного программирования представлены в разделе 4.5. Она реализована как Java апплет со встроенным интерпретатором команд стандартного языка программирования Tcl (Tool command language), дополненного набором команд для программирования робота (типа набора команд языка VAL). Важной особенностью разработанного языка дистанционного программирования роботов Rcl (Robot control language) является возможность программирования операций в on-line режиме. Причем можно выполнять как отдельные команды, так и любые их комбинации, в том числе с использованием управляющих конструкций языка Tcl (циклы, условия, и т.д.). Можно оформлять совокупности команд в виде процедур, сохранять на локальном диске отлаженные программы и наборы точек, и затем подгружать их в следующем сеансе работы. Все команды можно сперва отрабатывать на трехмерной графической модели робота и его рабочего пространства, а потом посылать их на исполнение удаленному роботу. Команды языка Rcl можно разделить на 3 группы: команды задания движения, команды для задания положений робота (точек в его рабочем пространстве) и сервисные команды. Команды задания движения позволяют оператору направлять схват робота в заранее определенные точки, сдвигать схват на желаемое расстояние от текущей позиции, вращать его относительно выбранной оси, и т.п. Например, команда
Команды задания положений робота позволяют определять
и изменять точки в рабочем пространстве робота. Например,
Сервисные команды позволяют пользователю открывать и закрывать схват, калибровать робот, выводить на экран текущие координаты робота, сохранять на диске и загружать с него в текущую сессию управления программы и рабочие точки. На основе разработанных методов были реализованы системы управления через Интернет роботами-манипуляторами РМ-01 и CRS A465, а также мобильным роботом Nomadic XR4000. Высокая эффективность разработанных методов при использовании медленных каналов связи общего пользования с ограниченной пропускной способностью и скоростью передачи данных была подтверждена в многочисленных экспериментах. В разделе 4.6 представлены особенности разработанных систем и экспериментальные результаты. Обсуждаются направления дальнейших исследований и области возможного использования результатов работы. На рисунке представлен эксперимент по захвату роботом РМ-01 стержня на бифилярном подвесе.
С использованием описанных методов были разработаны задачи практикума по мехатронике для студентов механико-математического факультета МГУ с возможностью дистанционного управления роботом-манипулятором РМ-01 через Интернет. Постановка задач приведена в разделе 4.7. В разделе 4.8 рассмотрены вопросы обеспечения безопасности работы системы управления робота с открытым доступом через Интернет. В частности, с использованием языка Java3D реализован алгоритм обеспечения несоударений робота и находящегося в его схвате объекта с объектами рабочего пространства робота. Новизна представленных в диссертации методов управления
роботами через Интернет определяется следующим:
Все разработанные автором методы ориентированы на применение в сетях общего пользования и показали высокую эффективность в многочисленных экспериментах при задержках в несколько секунд. В пятой главе описываются алгоритмы управления роботом-манипулятором в задачах взаимодействия с подвижными объектами при использовании в контуре управления системы технического зрения. Объекты совершают заранее неизвестное быстрое движение под действием естественных сил. Рассмотрены задачи автоматического захвата стержня на бифилярном подвесе и взаимодействия со сферическими маятниками – подвешенными на нитях теннисными мячами. Основная цель экспериментов со стержнем (см. рис. выше) –обеспечить его быстрый и надежный захват манипулятором. Эксперименты с мячами заключались в выполнении роботом одной из следующих операций: 1) подставить схват под качающийся мяч так, чтобы после удара мяч отследил желаемую эллиптическую траекторию, 2) ударить схватом по качающемуся мячу так, чтобы он сбил неподвижную мишень, 3) ударить схватом по качающемуся мячу так, чтобы он попал в другой качающийся мяч, 4) ударить схватом по качающемуся мячу так, чтобы он попал в другой качающийся мяч и этот второй мяч сбил неподвижную мишень.
Основой алгоритмов управления является совместное использование
системы технического зрения и моделей динамики подвижных объектов, что
позволило планировать движение робота на базе прогноза положения объектов.
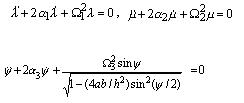
где в качестве обобщенных координат выбраны
- квадраты частот, g - ускорение свободного падения, точка означает дифференцирование по времени t. Выписанные уравнения достаточно просты и обеспечивают
приемлемую точность описания движения стержня. Конфигурация стенда такова,
что по модам Теннисный мяч, подвешенный на нити, представляет собой
сферический маятник. Максимальные отклонения каждого мяча от положения
равновесия в движениях на стенде, как правило, не превышают 50 см при длине
нити 220 см. В такой ситуации можно использовать линеаризованные уравнения
движения мячей.
Здесь точкой обозначено дифференцирование по времени t,
x и y - отклонения мяча от положения равновесия в системе координат Oxyz
в направлении осей Ox и Oy, g – ускорение свободного падения, l - длина
нити, на которой подвешен мяч,
где c1,…, c4 - произвольные постоянные, Существенным обстоятельством в работе было ограниченность максимальной скорости движения используемого манипулятора РМ-01 – схват может двигаться со скоростью не более 0.7 м/сек, в то время как объекты совершают движения со скоростями порядка 1.5 м/сек. Кроме этого, было необходимо использовать позиционный режим программирования движения робота, обеспечивающий наивысшую скорость схвата. Таким образом, задача заключалась в необходимости научиться алгоритмически преодолевать ограничения механики и логики робота при его взаимодействии с предметом, скорость движения которого может превышать скорость движения манипулятора. Ниже приводится описание алгоритма управления манипулятором РМ-01 в задаче захвата стержня. Опишем проверку возможности перехода манипулятора из начального положения в позицию захвата к моменту времени захвата tc. Пусть проверка начинается в момент tr. Значение tr определяется по таймеру ПЭВМ. Переход считается возможным, если разность tc – tr превышает расчетное время перехода t. Последнее находится по формуле t = t0 + t1 +t2, где t0 - главный член, определяемый расстоянием d между положениями центра схвата в начальной и конечной позициях, t1 - поправка, зависящая от изменения ориентации схвата при переходе, t2 - время, необходимое для передачи команд из ПЭВМ в стойку управления манипулятором и обработки команд в стойке. Вид каждого из этих слагаемых был определен экспериментально. Оказалось, что t0 = t0(d) – кусочно-постоянная функция, t1 равно либо нулю, либо 0.1 с и зависит от угла поворота системы координат схвата между ее конечным и начальным положениями, t2 = 0.27 с - постоянная величина. Максимальная скорость движения центра схвата выбрана равной 0.7 м/с, расстояние между начальным положением центра схвата и его конечным положением для данного стенда не превышает 0.6 м. В этом случае 0.47 с < t0 < 1 с, и время перехода лежит в пределах от 0.74 с до 1.37 с. Описанная проверка делается для каждой из семи или двух
точек стержня, за которые предполагается его схватить. После того, как
время захвата tc выбрано окончательно, находится время ожидания перед выходом
в позицию захвата tw = tc - tr - t. Если tw > 0.35 с, то производится
уточнение прогноза без изменения точки захвата - выдается заказ зрительной
системе наблюдать стержень на отрезке времени длиной (tw - 0.05 с), после
его выполнения обрабатываются новые данные измерений, и момент и позиция
захвата вычисляются заново. При tw < 0.35 с
уточнения прогноза не производится. Затем выдается команда на движение
робота в позицию захвата, и выполнение основной программы ПЭВМ приостанавливается.
Оно возобновляется в момент tc выдачей команды на закрытие схвата. Прямое
управление схватом из ПЭВМ по параллельному каналу, минуя стойку управления,
используется для более точной по времени выдачи этой команды.
Основная особенность описанного в пятой главе подхода состоит в необходимости разработки довольно сложной модели движения для каждого объекта манипулирования. В шестой главе представлен более универсальный метод прогноза движения с помощью простейших эмпирических моделей и экстраполяции результатов наблюдений текущего движения объектов. Описываются эксперименты по захвату роботом-манипулятором стержня, качающегося на бифилярном подвесе, при управлении роботом через сеть Интернет. Используется распределенное управление, при котором оператор формирует начальное движение стержня, выбирает желаемые точку и момент времени захвата, а финальная операция выполняется роботом автоматически. Формирование стратегии захвата выполняется оператором с использованием трехмерной on-line модели робота и объекта, отображающей их текущее состояние. Перед захватом с помощью измерений, выполняемых системой технического зрения, и модели колебаний стержня осуществляется определение движения последнего и выполняется прогноз этого движения. На основании прогноза рассчитываются условия захвата и соответствующие команды для его выполнения роботом. В разделе 6.1 дается постановка задачи. В разделе 6.2. описаны алгоритмы прогнозирования движения объектов. Описание экспериментального стенда и интерфейса дистанционного управления приведено в разделе 6.3. Представлены направления дальнейших исследований и области возможного практического применения результатов.
С использованием подхода распределенной автономии впервые решена задача взаимодействия робота-манипулятора с быстрым подвижным объектом при управлении роботом через сеть Интернет. Предусмотрен следующий сценарий эксперимента. В момент запуска управляющей программы стержень висит неподвижно, манипулятор находится в исходном положении вне области, в которой должен двигаться стержень. Удаленный оператор задает начальное движение стержня, выбирая точку на его изображении, генерируемом компьютерной моделью. Затем робот возбуждает колебания стержня, ударяя схватом по выбранной точке с назначенной случайным образом скоростью. Оператор наблюдает колебания на трехмерной модели рабочего пространства робота и выбирает точку на изображении стержня, за которую должен выполняться захват. Управляющая программа (на стороне сервера) определяет движение стержня, рассчитывает время захвата и положение стержня в этот момент, управляет роботом при захвате, распознает, произошел ли захват или надо повторить попытку захвата еще раз. Перечисленные задачи решаются примерно так же, как в главе 5. Отличие состоит в использовании более совершенных камер, алгоритмах первичной обработки зрительной информации и в алгоритмах определения и прогноза движения. В заключении сформулированы основные результаты диссертационной работы. ПОЛОЖЕНИЯ, ВЫНОСИМЫЕ НА ЗАЩИТУ 1. Создан макет стенда-тренажера для моделирования движения бортового манипулятора космического корабля “Буран”. Движение схвата манипулятора с учетом невесомости, инерции, упругости и нелинейностей в моделях приводов рассчитывается в вычислительной машине, а для его физического воспроизведения используется промышленный робот РМ-01 с другой кинематической схемой и динамикой. Разработаны методы моделирования динамики манипуляторов и алгоритмы работы стенда, обеспечившие воспроизведение движения в масштабе реального времени. На стенде была продемонстрирована принципиальная возможность проведения натурной отработки операций с помощью космического манипулятора в различных режимах управления. На базе этой разработки в ЦНИИМаш был создан стенд, который использовался для тренировки операторов-космонавтов. Актуально использование подобных стендов для моделирования движения крупногабаритных манипуляторов в лабораторных условиях. 2. Разработан метод расчета коэффициентов уравнений динамики манипуляторов в форме уравнений Лагранжа II рода. Метод применим для манипуляторов с вращательными и поступательными шарнирами, соседние оси которых перпендикулярны или параллельны. Метод позволяет решать прямую и обратную задачи динамики, удобен для реализации на ЭВМ. Использование матриц размера 3х3 и векторов относительных перемещений обеспечило высокую вычислительную эффективность расчета динамических коэффициентов. Для интегрирования уравнений динамики манипуляторов с нелинейностями в моделях приводов и упругими элементами в шарнирах разработаны эффективные алгоритмы на основе неявных методов. 3. Выполнены синтез и натурная отработка алгоритмов автоматического взаимодействия робота-манипулятора РМ-01 с подвижными объектами, обладающими сложным динамическим поведением. Эксперименты проводились с двумя типами объектов – стержнем на бифилярном подвесе и сферическими маятниками. Существенным в этих экспериментах является использование в контуре управления роботом системы технического зрения и выполнение прогноза движения объектов на основе их динамических моделей. Выполнены эксперименты возрастающей сложности, установившие предельные требования к точности работы системы технического зрения, выполнения прогноза и управления роботом. 4. Предложены и реализованы новые методы дистанционного управления роботами через сеть Интернет, обеспечившие эффективную работу в каналах связи общего пользования при наличии задержек. Методы основаны на использовании для непосредственного управления роботом виртуальной среды, содержащей графические модели робота и его рабочего пространства, и отображающей их текущее состояние в масштабе реального времени. Разработаны язык и среда дистанционного программирования движения роботов. Методы применимы к широкому классу систем дистанционного управления роботами с задержками. На основе разработанных методов были созданы системы управления через Интернет роботами-манипуляторами РМ-01, CRS A465, а также мобильным роботом Nomadic XR4000. Эффективность подхода подтверждена многими экспериментами, проведенными в разных условиях с использованием стандартных каналов связи. 5. На базе разработанных систем создана среда дистанционного обучения робототехнике и мехатронике. Принципиальная особенность системы – возможность проведения через Интернет экспериментов с реальным роботом – особенно важна для учебных заведений, не имеющих робототехнического оборудования. Разработаны задачи практикума по мехатронике для студентов механико-математического факультета МГУ. 6. Разработаны методы управления манипулятором
через сеть Интернет в задаче захвата подвижного объекта. Экспериментально
отработан подход “распределенной автономии”, позволяющий сочетать использование
навыков оператора при планировании задачи на верхнем уровне с возможностью
робота более точно выполнять финальную стадию операции захвата в автоматическом
режиме. Данный подход обеспечивает простое и надежное управление роботами
в динамических средах при наличии задержек в каналах связи.
1. Белоусов И.Р., Карташев В.А. Натурное моделирование
движений манипулятора в реальном масштабе времени / Сб. “Программирование
прикладных систем”. – М.: Наука, 1992, с. 214-219.
|



 (1)
(1)